












38,64 zł Netto
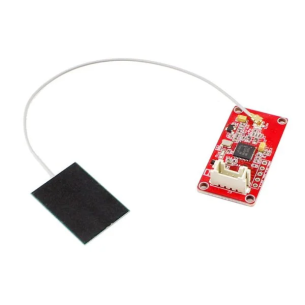
Elastyczny czujnik nacisku o wymiarach 400x15 mm. Przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0299
Elastyczny czujnik o wymiarach 400x15 mm, który może być używany do wykrywania niewielkich sił. Jest przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. Wykonany został z cienkiej folii (0,35 mm) o doskonałych właściwościach mechanicznych i przewodzących warstwach wrażliwych na nacisk nanometryczny. Działanie czujnika opiera się na rejestrowaniu intensywności i częstotliwości siły. Dzięki temu jest on powszechnie stosowany we wszystkich rodzajach urządzeń, takich jak przełącznik ciśnienia, system monitorowania czy urządzenia medyczne. Pełna dokumentacja dostępna jest na stronie produktu.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Okrągły, elastyczny, czujnik nacisku, który może być używany do realizacji bardzo czułego wykrywania siły. Czujnik jest trwały i przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0298
Okrągły, elastyczny, czujnik nacisku, który cechuje się dużą czułością oraz możliwością wykrywania nawet niewielkich zmian nacisku. Sensor jest trwały i przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0295
Okrągły, elastyczny, czujnik nacisku, który może być używany do realizacji bardzo czułego wykrywania siły. Czujnik jest trwały i przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0294
Okrągły, elastyczny, czujnik siły nacisku, który cechuje się dużą czułością oraz możliwością wykrywania nawet niewielkich zmian nacisku. Sensor jest trwały i przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0297
Brak towaru
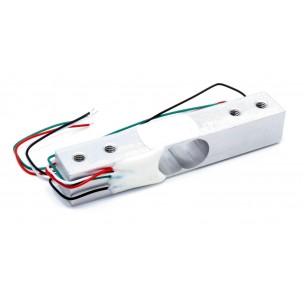
Belka tensometryczna aluminiowa, pozwalająca na pomiar masy do 2 kilogramów. Posiada cztery przewody. Znajduje zastosowanie w wagach kuchennych oraz wagach przenośnych.
Belka tensometryczna aluminiowa, pozwalająca na pomiar masy do 20 kilogramów. Posiada cztery przewody. Znajduje zastosowanie w wagach kuchennych oraz wagach przenośnych, posiada przewód o długości 21 cm, RoHS.
Brak towaru
TAS606 to sensor tensometryczny pozwalający na pomiar masy do 200kg, działa w oparciu o mostek Wheatstone\'a. Posiada ekranowany przewód sygnałowy i stopień ochrony IP66. Sparkfun SEN-13332
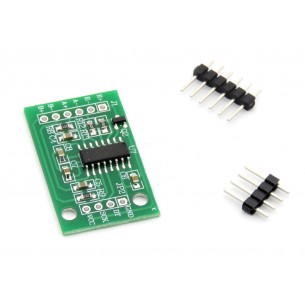
Moduł pozwala na dołączenie tensometru (pracującego w układzie mostka Wheatstone\'a) i przetworzenie sygnału analogowego na jego reprezentację cyfrową, dostępną na liniach wyjściowych modułu. Układ przetwarza sygnał z rozdzielczością 24bit i może być zasilany napięciem 2,7V - 5,5V. Moduł szczególnie polecany do konstrukcji wag cyfrowych w połączeniu z Arduino
SparkFun Load Sensor Combinator (Ver. 1.1) to płytka umożliwiająca połączenie 4 czujników obciążenia w mostek Wheatstone\'a. Umożliwia podłączenie czujnika temperatury DS18B20 oraz przesłanie sygnałów za pomocą skrętki Ethernet dzięki złączu RJ45. SparkFun BOB-13878
SparkFun OpenScale to prosty w użyciu układ pozwalający na podłączenie czujników ciężaru i temperatury. Umożliwia odczyt z wielu typów czujników ciężaru takich jak belki tensometryczne czy czujniki nacisku i w prosty sposób przesłanie danych pomiarowych do komputera użytkownika. SparkFun SEN-13261
Moduł z czujnikiem ugięcia z dwiema sondami pomiarowymi. Komunikacja przez interfejs I2C. SparkFun SEN-14666
Brak towaru
Okrągły, elastyczny, czujnik nacisku, który może być używany do realizacji bardzo czułego wykrywania siły. Czujnik jest trwały i przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0298
Okrągły, elastyczny, czujnik nacisku, który cechuje się dużą czułością oraz możliwością wykrywania nawet niewielkich zmian nacisku. Sensor jest trwały i przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0295
Okrągły, elastyczny, czujnik nacisku, który może być używany do realizacji bardzo czułego wykrywania siły. Czujnik jest trwały i przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0294
Okrągły, elastyczny, czujnik siły nacisku, który cechuje się dużą czułością oraz możliwością wykrywania nawet niewielkich zmian nacisku. Sensor jest trwały i przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0297
Brak towaru
Podłużny, elastyczny, czujnik nacisku, który cechuje się dużą czułością oraz możliwością wykrywania nawet niewielkich zmian nacisku. Sensor jest trwały i przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji.. DFRobot SEN0293
Elastyczny czujnik nacisku o wymiarach 400x15 mm. Przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0299
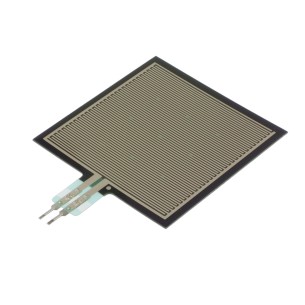
Elastyczny czujnik nacisku o wymiarach 40 x 40 mm. Przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0296
Moduł Grove z czujnikiem nacisku FSR402. Płytka została wyposażona w złącze Grove z wyjściem analogowym. Seeed Studio 101020553
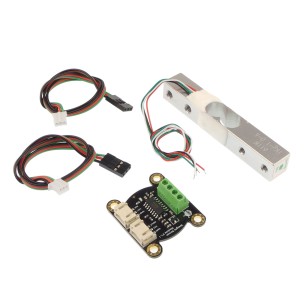
Zestaw z modułem przetwornika ADC HX711 oraz czujnikiem nacisku w postaci belki tensometrycznej. Komunikuje się przez interfejs UART. Umożliwia budowę prostej wagi domowej. DFRobot SEN0160
Elastyczny czujnik nacisku o wymiarach 400x15 mm. Przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0299