")
")
")
")

106,39 zł Netto
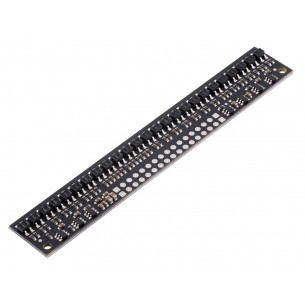
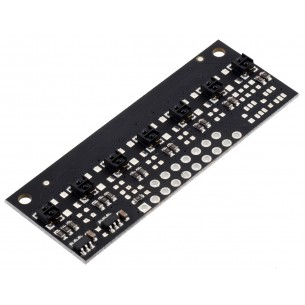
Moduł z 15 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4315
Czujnik obiciowy składający się z szeregu 15 transoptorów typu QTRX z możliwością sterowania indywidualnie jasnością każdego z podczerwonych LED-ów. Sensory na płytce są mocno zagęszczone (HD), a odległość między nimi wynosi 4mm. Moduł może być zasilany napięciem z zakresu od 2,9 V do 5,5 V i niezależnie od napięcia zasilania pobiera prąd do 34 mA. Optymalna odległość czujnika od podłoża to 10 mm, a maksymalna odległość wynosi 50 mm. Moduł idealnie nadaje się do wykrywania zmian w odbiciu światła, dzięki czemu może być stosowany do wykrywania krawędzi podłoża lub do śledzenia linii w robotach typu linefollower.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Podwozie Romi Chassis Kit to idealna baza do budowy niewielkiego robota mobilnego. W zestawie znajdziemy wszystkie niezbędne elementy mechaniczne do budowy kołowego robota mobilnego. Zestaw do samodzielnego montażu. Pololu 3502
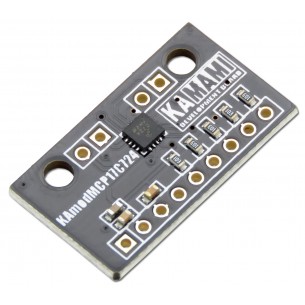
KAmodMPC17C724 to moduł z podwójnym mostkiem H typu MPC17C724. Układ pozwala na sterowanie dwoma silnikami szczotkowymi DC lub jednym bipolarnym silnikiem krokowym. Sterownik pracuje przy napięciu z zakresu 2,7 - 5,5 V i może współpracować z silnikami o poborze prądu do 0,4 A.
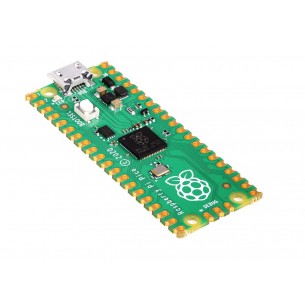
Płytka z mikrokontrolerem RP2040 wyposażonym w dwa rdzenie ARM Cortex-M0+ pracujące z częstotliwością 133 MHz, 264 kB RAM. Na płytce znajduje się również 2 MB pamięci QSPI flash. Układ może być programowany w C/C++ lub microPython. Raspberry Pi Pico
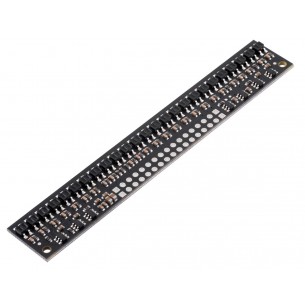
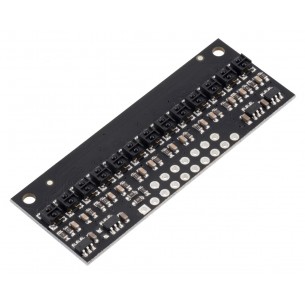
Moduł z 25 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4225
Moduł z 25 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4125
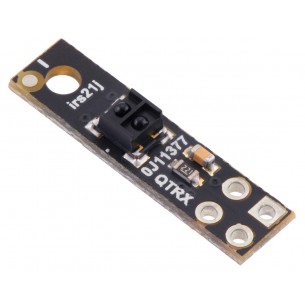
Moduł z 1 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4301
Moduł z 1 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4341
Moduł z 7 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4447
Moduł z 7 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4347
Moduł z 13 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4413
Moduł z 13 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4313
Moduł z 13 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4353
Moduł z 25 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4425
Brak towaru
Moduł z pięcioma czujnikami odbiciowymi ITR20001/T. Zasilany napięciem od 3,3 V do 5 V, ma wyjścia analogowe. Może wykrywać obiekty w odległości do 5 mm. Waveshare Tracker Sensor
Czujnik odbiciowy z wyjściem cyfrowym. Próg może być regulowany za pomocą wbudowanego potencjometru
Moduł z czujnikami linii przeznaczony do współpracy z zestawem Kitronik. Ma dwa czujniki w postaci fototranzystorów, które generują napięcie analogowe, możliwe do odczytania przez mikrokontroler. Moduł wyposażony jest w 4-pinowe złącze (3V, 0V, L, R), które umożliwia zasilanie oraz odbiór sygnałów z czujników, a napięcie wyjściowe zmienia się w zależności od wykrywanej powierzchni, co pozwala na zastosowanie go nie tylko z zestawem Kitronik, ale także z platformami takimi jak Arduino czy Raspberry Pi Pico. Kitronik 56111
Moduł do micro:bit, który umożliwia wykrywanie światła, obiektów oraz śledzenie linii, dzięki czemu świetnie nadaje się do projektów edukacyjnych i robotycznych. Wyposażony w trzy fototranzystory zapewnia precyzyjne pomiary, a sygnał analogowy przekazywany do micro:bit pozwala na dokładną analizę otoczenia. Płytkę można podłączyć bezpośrednio do micro:bit lub za pomocą przewodów krokodylkowych. Kitronik 5678
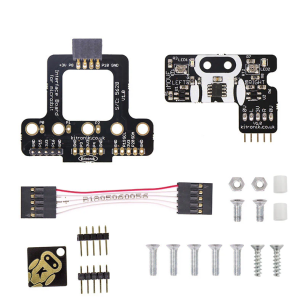
Zestaw do robotów :MOVE mini MK2, który pozwala automatycznie śledzić linię, zwiększając interaktywność projektów edukacyjnych. Zestaw jest prosty w montażu, nie wymaga lutowania, a regulowane czujniki pozwalają precyzyjnie dostosować czułość dla lewej i prawej strony robota. Moduł może śledzić zarówno ciemną linię na jasnym tle, jak i jasną na ciemnym, a kompatybilność wstecz z pierwszą wersją :MOVE mini ułatwia wykorzystanie w starszych projektach. Kitronik 5659
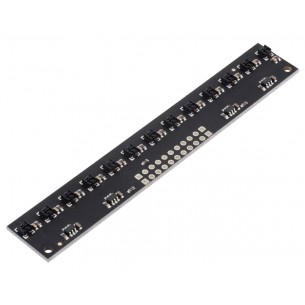
Czujnik odbicia QTRXL-MD-01A-S o analogowym wyjściu umożliwia precyzyjne wykrywanie linii i obiektów. Dzięki zwiększonemu zasięgowi i wysokiej czułości znajduje zastosowanie w projektach robotycznych i automatyki. Złącze JST SH umożliwia łatwą integrację, a szeroki zakres napięcia zasilania pozwala na elastyczne zastosowanie w systemach 3.3 V i 5 V.
Moduł z 15 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4315