







")
")
")
")

52,78 zł Netto
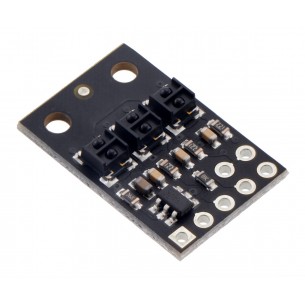
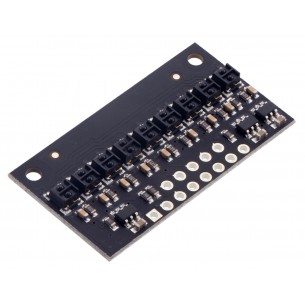
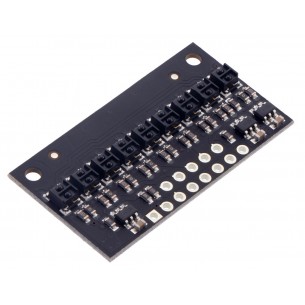
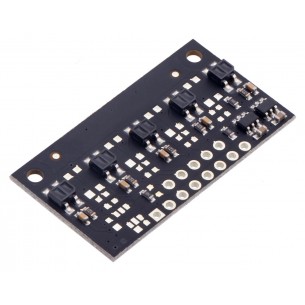
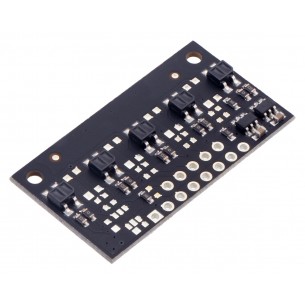
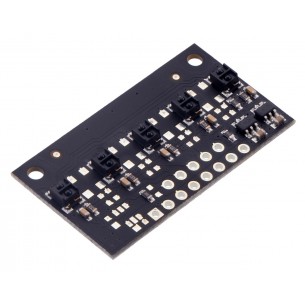
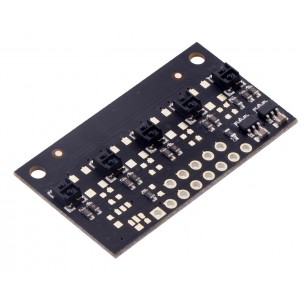
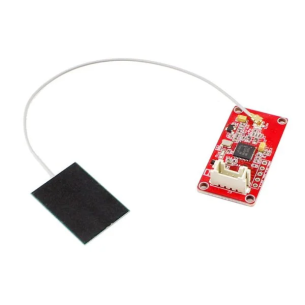
Moduł z 7 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4347
Czujnik obiciowy składający się z szeregu 7 transoptorów typu QTRX z możliwością sterowania indywidualnie jasnością każdego z podczerwonych LED-ów. Sensory na płytce są średnio zagęszczone (MD), a odległość między nimi wynosi 8mm. Moduł może być zasilany napięciem z zakresu od 2,9 V do 5,5 V i niezależnie od napięcia zasilania pobiera prąd do 17 mA. Optymalna odległość czujnika od podłoża to 10 mm, a maksymalna odległość wynosi 40 mm. Moduł idealnie nadaje się do wykrywania zmian w odbiciu światła, dzięki czemu może być stosowany do wykrywania krawędzi podłoża lub do śledzenia linii w robotach typu linefollower.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
A-Star 32U4 Prime LV to płytka bazowa oparta o mikrokontroler ATmega32U4. Płytka jest zgodna wymiarami i złączami z popularną płytką Arduino. A-Star Prime oferuje wiele nowych funkcjonalności w tym możliwość zasilania napięciem w zakresie 2,7-11,8 V. Pololu 3107
Podwozie Romi Chassis Kit to idealna baza do budowy niewielkiego robota mobilnego. W zestawie znajdziemy wszystkie niezbędne elementy mechaniczne do budowy kołowego robota mobilnego. Zestaw do samodzielnego montażu. Pololu 3502
KAmodMPC17C724 to moduł z podwójnym mostkiem H typu MPC17C724. Układ pozwala na sterowanie dwoma silnikami szczotkowymi DC lub jednym bipolarnym silnikiem krokowym. Sterownik pracuje przy napięciu z zakresu 2,7 - 5,5 V i może współpracować z silnikami o poborze prądu do 0,4 A.
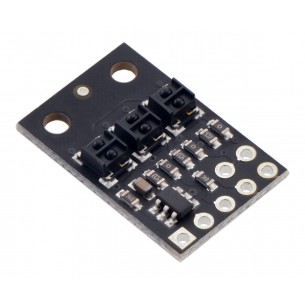
Moduł z 3 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4303
Moduł z 3 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4403
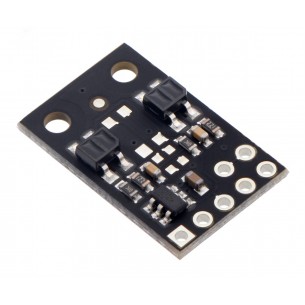
Moduł z 2 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4142
Moduł z 2 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4242
Moduł z 2 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4342
Moduł z 2 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4442
Brak towaru
Moduł z 9 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4109
Moduł z 9 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4209
Moduł z 9 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4309
Moduł z 9 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4409
Brak towaru
Moduł z 5 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4145
Brak towaru
Moduł z 5 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4245
Moduł z 5 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4345
Moduł z 5 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4445
Moduł z 6 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4106
Moduł z 6 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4206
Moduł z 7 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4347