









 output")
 output")
 output")
 output")

zł52.78 tax excl.
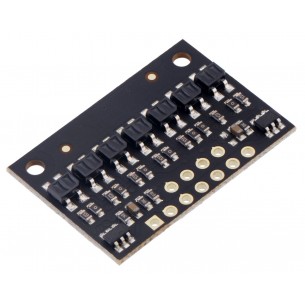
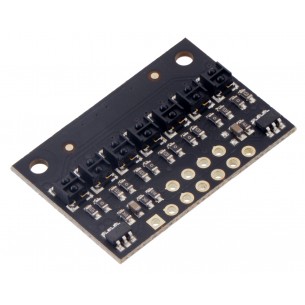
Module with 7 QTRX type optocoupler with RC (digital) output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 40 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4347
Reflectance sensor consisting of array 7 QTRX optocouplers with the ability to individually control the brightness of each of the infrared LEDs. The sensors on the board are medium density (MD) and the distance between them is 8 mm. The module can be supplied with the voltage ranging from 2.9 V to 5.5 V and draws current up to 17 mA. The optimum distance from the sensor to the ground is 10 mm and the maximum distance is 40 mm. The module is ideally suited for detecting changes in light reflection, so it can be used for edge detection or line tracking in linefollower robots.
Data sheet
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
The Pololu A-Star 32U4 Prime is a general-purpose programmable board based on Atmel’s ATmega32U4 AVR microcontroller and arranged in the common Arduino form factor exemplified by the Uno R3 and Leonardo. Pololu 3107
The versatile Romi chassis is a great starting point for your next mobile robot. This kit includes all the basic mechanical parts to get up and running, including two motors, two wheels, one ball caster, and battery contacts. The wheels and ball are white; all other plastic components are red.
KAmodMPC17C724 is a module with a double MP bridge bridge type MPC17C724. The system allows you to control two DC brush motors or one bipolar stepping motor. The controller operates at a voltage range of 2.7 - 5.5 V and can work with motors with power consumption up to 0.4 A.
QTR-1A Reflectance Sensor (2-Pack)
QTR-1RC Reflectance Sensor (2-Pack)
No product available!
QTR-3A Reflectance Sensor Array
No product available!
No product available!
No product available!
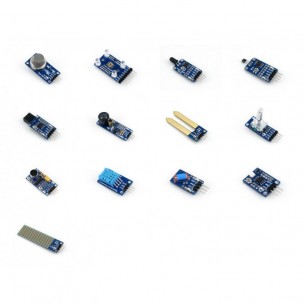
The set contains: MQ-5 Gas Sensor, Color Sensor, Flame Sensor, Hall Sensor, Infrared Reflective Sensor, Laser Sensor, Moisture Sensor, Rotation Sensor, Sound Sensor, Temperature-Humidity Sensor, Tilt Sensor, UV Sensor, Liquid Level Sensor. Modules compatible with Arduino
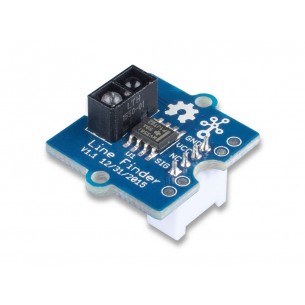
This module can be applied to intellectual robot, obstacle avoidance car, counter device in the pipeline, black and white lines tracking device. This infrared sensor contains two parts: an infrared transmitter and an infrared receiver.
Module with a reflection sensor (line sensor) RS-06WD. The board is equipped with a Grove connector and communicates via a digital interface. Seeed Studio 101020172
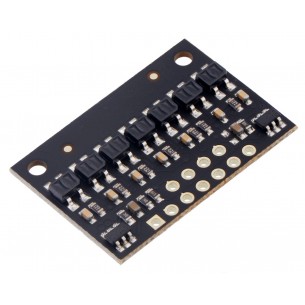
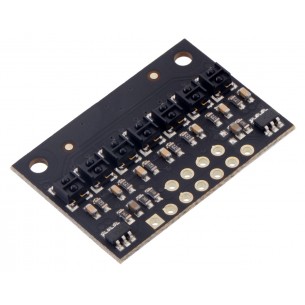
Module with 7 QTR type optocoupler with analog output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 40 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4207
Module with 7 QTR type optocoupler with RC (digital) output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 40 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4107
Module with 7 QTRX type optocoupler with analog output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 40 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4407
Module with 7 QTRX type optocoupler with RC (digital) output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 40 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4307
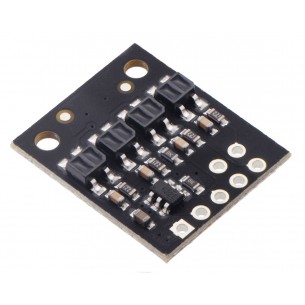
Module with 4 QTR type optocoupler with RC (digital) output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 40 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4104
No product available!
Module with 2 QTR type optocoupler with RC (digital) output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 30 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4102
Module with 7 QTRX type optocoupler with RC (digital) output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 40 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4347