- Obecnie brak na stanie





Jacek Janczyk
Poznaj możliwości platformy Arduino!
Arduino to niesamowita platforma, która otworzyła świat elektroniki przed wszystkimi. Dzięki niej możesz zbudować zaawansowany układ elektroniczny bez konieczności wykonywania czasochłonnych projektów i żmudnych obliczeń. Arduino błyskawicznie zyskało ogromną popularność, a w ślad za nią pojawiły się w sprzedaży liczne dodatkowe moduły. Pozwalają one zbudować dowolne urządzenie — ogranicza Cię tylko Twoja wyobraźnia!
Ta wyjątkowa książka została w całości poświęcona platformie Arduino. Znajdziesz tu szczegółowe omówienie możliwości platformy, liczne przykłady oraz opisy. W trakcie lektury dowiesz się, jak przygotować środowisko pracy, oraz rozpoczniesz tworzenie prostych projektów, korzystających z cyfrowych portów wejścia-wyjścia. W kolejnych rozdziałach poznasz coraz bardziej zaawansowane możliwości Arduino. Wykorzystasz silniki prądu stałego i serwomechanizmy, zastosujesz czujniki ultradźwiękowe oraz wyświetlisz informacje na wyświetlaczu LCD. Ponadto przekonasz się, że można zintegrować Arduino z systemem iOS oraz innym oprogramowaniem. Książka ta jest doskonałą lekturą dla wszystkich pasjonatów elektroniki.
Dzięki tej książce:
Twoja przepustka do świata elektroniki!
Spis treści
Wstęp (11) Podziękowania (13) O książce (15) CZĘŚĆ I. ZACZYNAMY (19) Rozdział 1. Witaj, Arduino (21)
Rozdział 2. Cyfrowe wejścia i wyjścia (41)
Rozdział 3. Proste projekty: wejście i wyjście (61)
CZĘŚĆ II. ZAPRZĘGAMY ARDUINO DO PRACY (81) Rozdział 4. Rozszerzanie Arduino (83)
Rozdział 5. Arduino w ruchu (105)
Rozdział 6. Wykrywanie przedmiotów (139)
Rozdział 7. Wyświetlacze LCD (155)
Rozdział 8. Komunikacja (177)
Rozdział 9. Czas na gry (213)
Rozdział 10. Integracja Arduino z urządzeniami iOS (241)
Rozdział 11. Elektroniczne gadżety (269)
Rozdział 12. Stosowanie nakładek (287)
Rozdział 13. Integracja z oprogramowaniem (305)
Dodatek A. Instalacja środowiska Arduino IDE (329)
Dodatek B. Podręcznik kodowania (337)
Dodatek C. Biblioteki (353)
Dodatek D. Lista komponentów (357) Dodatek E. Przydatne odnośniki (361) Skorowidz (363)
Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 100:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 3127
Brak towaru
Moduł, który pozwala na podłączenie kamer ArduCAM z interfejsem CSI do komputera PC lub minikomputerów poprzez interfejs USB3.0. Obsługuje nie tylko czujniki obrazu o wysokiej rozdzielczości i dużej liczbie klatek na sekundę, ale także kamerę stereoskopową i funkcje sterowania IRCUT. ArduCAM B0111
Brak towaru
Niewielki minikomputer z czterordzeniowym układem SoC RockChip RK3328 (ARM Cortex-A53). Komputer jest wyposażony w pamięć RAM DDR4 o pojemności 2 GB, port Gigabit Ethernet i USB 3.0. Każdy moduł posiada własny, unikalny adres MAC. NanoPi NEO3 2GB
Brak towaru
Obudowa do minikomputera NanoPi NEO3 w kolorze białym. Umożliwia swobodny dostęp do złącza Ethernet, USB, kart microSD oraz złącza zasilania. FriendlyELEC Case for NEO3
Brak towaru
Moduł mostka HDMI do CSI-2 oparty o układ TC358840. Posiada 22-pinowe złącze FPC o rastrze 0,5 mm oraz złącze audio. Sygnał wejściowy doprowadzany jest przez złącze HDMI. Auvidea 70511
Brak towaru
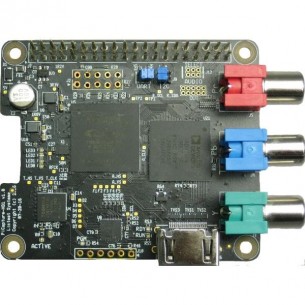
Moduł do przechwytywania obrazu dla Raspberry Pi. Przechwytuje wideo w wysokiej rozdzielczości ze źródeł cyfrowych (HDMI/DVI), analogowych (komponent YPbPr) i komputerowych (RGB) w rozdzielczości 480p, 720p i 1080p. Picapture HD1
Brak towaru
Obudowa dedykowana do minikomputerów Cubieboard i Cubieboard 2. Cubieboard Deluxe Case
Brak towaru
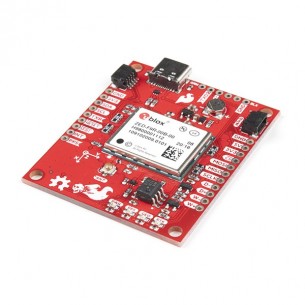
Moduł GPS z układem u-blox ZED-F9R. Wykorzystuje technologię Automotive Dead Reckoning (ADR). Zapewnia bardzo dokładną i ciągłą pozycję poprzez połączenie czujnika 3D IMU, modelu dynamiki pojazdu, danych korekcyjnych i pomiarów GNSS. SparkFun GPS-16475
Brak towaru
Moduł GPS z układem u-blox ZED-F9R. Wykorzystuje technologię Automotive Dead Reckoning (ADR). Zapewnia bardzo dokładną i ciągłą pozycję poprzez połączenie czujnika 3D IMU, modelu dynamiki pojazdu, danych korekcyjnych i pomiarów GNSS. SparkFun GPS-16344
Brak towaru
Moduł z 4 przekaźnikami sterowany przez interfejs I2C. Każdy przekaźnik może przełaczać prąd do 40 A przy 28-380 V AC. SparkFun KIT-16833
Brak towaru
ActivePresenter to wygodne narzędzie do tworzenia interaktywnych szkoleń e-learningowych zawierających prezentacje, quizy, symulację oprogramowania lub nawet edukacyjne gry
Brak towaru
Niewielki moduł konwertera USB-UART TTL oparty na układzie CH340N ze złączem microUSB. Wyposażony w diodę sygnalizującą zasilanie.
Brak towaru
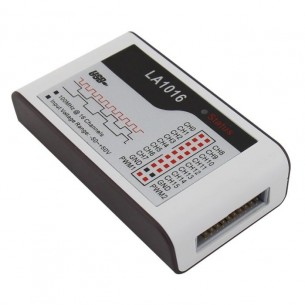
16-kanałowy analizator stanów logicznych o maksymalnej częstotliwości próbkowania 100 MHz. Może dekodować dane w ramach większości popularnych protokołów komunikacyjnych. Współpracuje z systemami Windows. LA1016
Brak towaru
Moduł kamery USB o rozdzielczości 8 MP oparty na matrycy Sony IMX179 1/3.2" zgodny z UVC. Posiada zmienną ogniskową regulowaną w zakresie od 2,8 do 12 mm. Wyposażona w obiektyw z mocowaniem CS ze zintegorwanym filtrem UV. ArduCAM UB0226
Brak towaru
Zestaw ewaluacyjny wyposażony w układ FPGA Lattice iCE40 HX. Zestaw jest obsługiwany przez iCEcube2 i języki Verilog oraz Lucid. SparkFun DEV-16526
Brak towaru
Ręczna kamera termowizyjna z wyświetlaczem LCD o przekątnej 3,2". Wykonuje pomiar temperatury w zakresie od -20 do 300°C z dokładnościa do 2°C. HTI HT-19
Brak towaru
Jacek Janczyk