- Obecnie brak na stanie





Jacek Janczyk
Poznaj możliwości platformy Arduino!
Arduino to niesamowita platforma, która otworzyła świat elektroniki przed wszystkimi. Dzięki niej możesz zbudować zaawansowany układ elektroniczny bez konieczności wykonywania czasochłonnych projektów i żmudnych obliczeń. Arduino błyskawicznie zyskało ogromną popularność, a w ślad za nią pojawiły się w sprzedaży liczne dodatkowe moduły. Pozwalają one zbudować dowolne urządzenie — ogranicza Cię tylko Twoja wyobraźnia!
Ta wyjątkowa książka została w całości poświęcona platformie Arduino. Znajdziesz tu szczegółowe omówienie możliwości platformy, liczne przykłady oraz opisy. W trakcie lektury dowiesz się, jak przygotować środowisko pracy, oraz rozpoczniesz tworzenie prostych projektów, korzystających z cyfrowych portów wejścia-wyjścia. W kolejnych rozdziałach poznasz coraz bardziej zaawansowane możliwości Arduino. Wykorzystasz silniki prądu stałego i serwomechanizmy, zastosujesz czujniki ultradźwiękowe oraz wyświetlisz informacje na wyświetlaczu LCD. Ponadto przekonasz się, że można zintegrować Arduino z systemem iOS oraz innym oprogramowaniem. Książka ta jest doskonałą lekturą dla wszystkich pasjonatów elektroniki.
Dzięki tej książce:
Twoja przepustka do świata elektroniki!
Spis treści
Wstęp (11) Podziękowania (13) O książce (15) CZĘŚĆ I. ZACZYNAMY (19) Rozdział 1. Witaj, Arduino (21)
Rozdział 2. Cyfrowe wejścia i wyjścia (41)
Rozdział 3. Proste projekty: wejście i wyjście (61)
CZĘŚĆ II. ZAPRZĘGAMY ARDUINO DO PRACY (81) Rozdział 4. Rozszerzanie Arduino (83)
Rozdział 5. Arduino w ruchu (105)
Rozdział 6. Wykrywanie przedmiotów (139)
Rozdział 7. Wyświetlacze LCD (155)
Rozdział 8. Komunikacja (177)
Rozdział 9. Czas na gry (213)
Rozdział 10. Integracja Arduino z urządzeniami iOS (241)
Rozdział 11. Elektroniczne gadżety (269)
Rozdział 12. Stosowanie nakładek (287)
Rozdział 13. Integracja z oprogramowaniem (305)
Dodatek A. Instalacja środowiska Arduino IDE (329)
Dodatek B. Podręcznik kodowania (337)
Dodatek C. Biblioteki (353)
Dodatek D. Lista komponentów (357) Dodatek E. Przydatne odnośniki (361) Skorowidz (363)
Rurka termokurczliwa z cyną i klejem. Stosowana do szybkiego łączenia przewodów
Brak towaru
Rurka termokurczliwa z cyną i klejem. Stosowana do szybkiego łączenia przewodów
Brak towaru
Rurka termokurczliwa z cyną i klejem. Stosowana do szybkiego łączenia przewodów
Brak towaru
Moduł z cyfrowym czujnikiem gazów MiCS-4514. Pozwala na pomiar stężenia CO, C2H5OH, H2, NO2, NH3 i komunikuje się przez interfejs I2C. DFRobot SEN0377
Brak towaru
Uniwersalny moduł zasilający pracujący na bazie czterech akumulatorów 18650. Oferuje wyjścia DC o napięciach 9 V, 12 V, 24 V oraz regulowane w zakresie od 1 do 20 V, a także dwa wyjścia USB 5 V. DFRobot FIT0674
Brak towaru
Elastyczny adapter do karty microSD na SD o długości 25 cm. Obsługuje wszystkie pojemności i typy kart m.in.: 16 GB, 32 GB, 64 GB, 128 GB Micro SD/SDHC
Brak towaru
Czarno-biały wyświetlacz e-Paper o przekątnej 7,5" i rozdzielczości 800x480 px. Interfejs SPI. Bez płytki PCB, w pełni laminowany. Waveshare 7.5inch e-Paper (G)
Brak towaru
Mini zgrzewarka przeznaczona do łączenia ogniw akumulatorów typu 18650
Brak towaru
Moduł sterownika silnika bezszczotkowego o wydajności prądowej do 20 A. Może współpracować z pakietami LiPo 3S i 4S. BLHeli XSD20A
Brak towaru
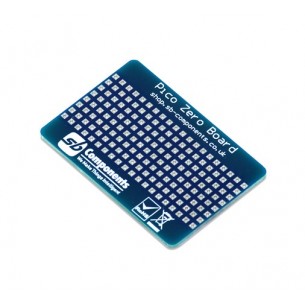
Płytka z otworami prototypowymi dedykowana do Raspberry Pi Pico. Oferuje obszar 6x20 otworów o rastrze 2,54 mm z oznaczonymi etykietami wyprowadzeń. SB Components 21499
Brak towaru
Zestaw do prototypowania dedykowany do Raspberry Pi Pico. Oferuje wyprowadzenia wszystkich pinów RPi Pico, płytkę stykową oraz przyciski, diody LED i buzzer. SB Components 20843
Brak towaru
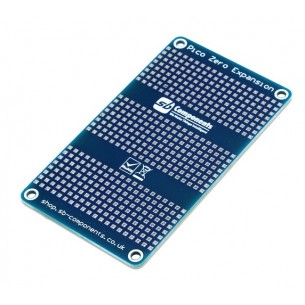
Płytka z otworami prototypowymi dedykowana do Raspberry Pi Pico. Oferuje obszar 6x20 otworów oraz dwa obszary 8x20 otworów o rastrze 2,54 mm z oznaczonymi etykietami wyprowadzeń. SB Components 21505
Brak towaru
Moduł z przekaźnikiem przeznaczony do współpracy z Raspberry Pi Pico. Pozwala na sterowanie urządzeniami o napięciu pracy do 250 V AC i natężeniu do 7 A lub napięciu 30 V DC i natężeniu 10 A. SB Components 21277
Brak towaru
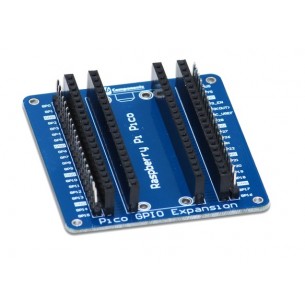
Ekspander pinów przeznaczony do płytek Raspberry Pi Pico. Wyposażony został w standardowe złącze żeńskie i dwa zestawy (jeden męskich i jeden żeńskiech) listew 2x20 pinów. SB Components 20812
Brak towaru
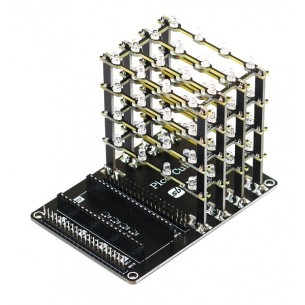
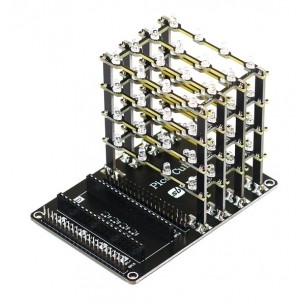
Moduł z trójwymiarową matrycą LED 4x4x4 (64 LED) dedykowany dla Raspberry Pi Pico. Pozwala na sterowanie każdą diodą i uzyskanie efektów świetlnych 3D. SB Components 22663
Brak towaru
Moduł z trójwymiarową matrycą LED 4x4x4 (64 LED) dedykowany dla Raspberry Pi Pico. Pozwala na sterowanie każdą diodą i uzyskanie efektów świetlnych 3D. SB Components 22670
Brak towaru
Jacek Janczyk