- Obecnie brak na stanie
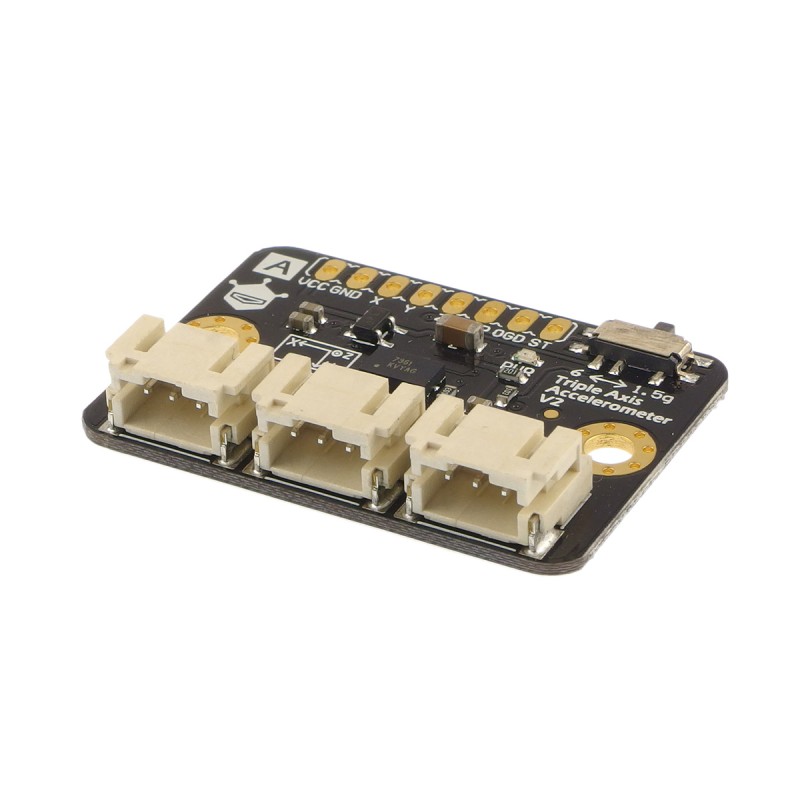





Moduł z 3-osiowym analogowym akcelerometrem MMA7361. Na płytce umieszczono 3 złącza Gravity (dla każdej z osi). Zakres działania czujnika może być konfigurowany za pomocą przełacznika DIP. DFRobot DFR0143
Moduł z 3-osiowym analogowym akcelerometrem MMA7361. Na płytce umieszczono 3 złącza Gravity (dla każdej z osi). Zakres działania czujnika ±1,5g/6g może być konfigurowany za pomocą przełacznika DIP. Na stronie Wiki produktu dostępna jest instrukcja obsługi wraz z przykładowymi programami.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Arduino Uno Rev3 to popularna płytka z mikrokontrolerem Atmel ATmega328 z rodziny AVR, do dyspozycji użytkownika jest 14 linii I/O, 6 kanałów PWM, 6 wejść analogowych. Dodatkowy mikrokontroler ATmega16U4 realizuje komunikację przez interfejs USB. Arduino A000066
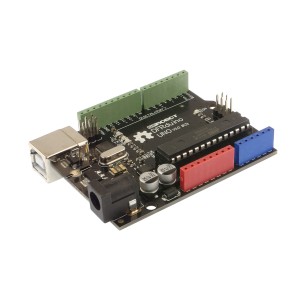
DFRduino UNO R3 to płytka bazowa kompatybilna z Arduino. Płytka posiada mikrokontroler ATmega 328P. Do dyspozycji użytkownika jest 14 portów GPIO (wejść/wyjść) z czego 6 może generować sygnał PWM. DFRobot DFR0216
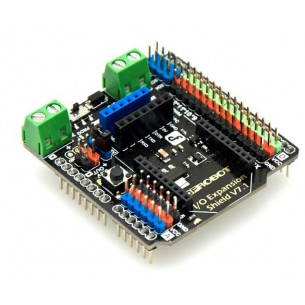
Płytka rozszerzająca dla Arduino, pozwala na łatwe dołączenie modułów XBee, ma oddzielne wyjścia dla magistral I2C, SPI oraz UART. Wbudowany stabilizator napięcia 3,3V oraz przełącznik trybu pracy ułatwiają programowanie Arduino, gdy dołączony do gniazd jest moduł XBee. DFRobot DFR0265
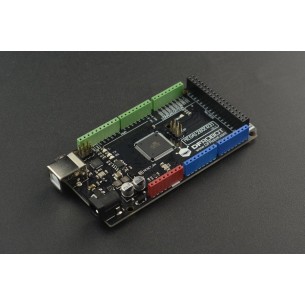
Płytka z mikrokontrolerem ATmega1280 z rodziny AVR, do dyspozycji użytkownika jest 54 linii I/O, 14 kanałów PWM, 16 wejść analogowych. DFRobot DFR0003
Brak towaru
Brak towaru
Michalski Wojciech
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
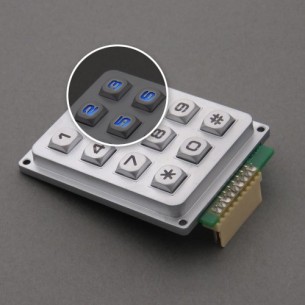
Uniwersalna metalowa klawiatura firmy ACCORD, 12 przycisków, numeryczna z niebieskim podświetleniem LED. Płytka PCB ma wlutowane 10-pinowe ocynowane złącze proste, raster 2.54mm WF10S KB304-MNS-WP-B
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Moduł z 3-osiowym analogowym akcelerometrem MMA7361. Na płytce umieszczono 3 złącza Gravity (dla każdej z osi). Zakres działania czujnika może być konfigurowany za pomocą przełacznika DIP. DFRobot DFR0143