
















46,10 zł Netto
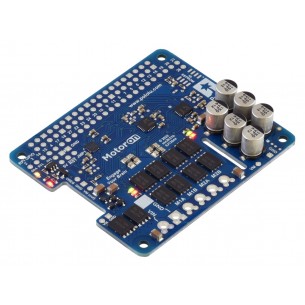
Moduł sterownika silników Pololu DRV8835 przeznaczony jest dla mikrokomputerów Raspberry Pi B+, Pi A+, Pi 2B+, Pi 3B+, Pi 4B wpinany jest bezpośrednio w złącze z wyprowadzaniami GPIO. Płytka oparta jest o sterownik silników DRV8835 firmy Teksas Instruments który jest podwójnym mostkiem H, więc można do niego podłączyć dwa silniki DC lub jeden silnik krokowy.
Silniki mogą być zasilane napięciem od 1,5 V do 11 V, natomiast logika układu może być zasilana napięciem od 2 V do 7 V. Prąd ciągły dla każdego z silników wynosi 1,2 A, prąd chwilowy wynosi 1,5 A, można również połączyć równolegle oba kanały aby uzyskać 2,4 A prądu chwilowego i 3 A prądu ciągłego. Domyślnie płytka korzysta z portów GPIO: 5, 6, 12 i 13 wykorzystując z sprzętowe modulatory PWM, możliwa jest zmiana używanych portów na inne. Moduł jest przeznaczony dla Raspberry Pi ze złączem GPIO 40-pin czyli modeli B+, A+ i nowszych.
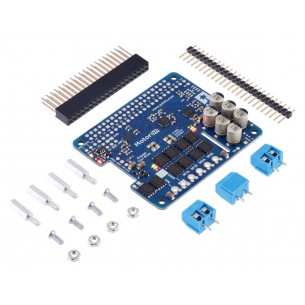
Na płytce znajduje się wyprowadzanie umożliwiające podłączenie stabilizatora lub przetwornicy w celu zasilania Raspberry Pi z tego samego źródła zasilania co silniki. Należy jednak pamiętać aby nigdy nie podłączać innego źródła zasilania do RPI podczas gdy przetwornica/stabilizator jest podłączony gdyż może to doprowadzić do uszkodzenia Raspberry Pi, należy również dobrać odpowiedni stabilizator lub przetwornicę. Wszystkie elementy montowane powierzchniowo zostały przylutowane natomiast złącza umożliwiające podłączenie modułu do RPI oraz złącza pozwalające na podłączenie silników należy przylutować samodzielnie.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Niewielki silnik dużej mocy z metalową przekładnią 100:1, napięciem pracy 6 V, poborem prądu od 0,07 A do 1,6 A, prędkością 310 RPM i maksymalnym momentem obrotowym 1,7 kg*cm. Pololu 1101
Brak towaru
Niewielki moduł przetwornicy step-up/step-down z napięciem wyjściowym 5 V, oraz prądem 0,5 A dla napięcie wejściowego 2,7-5 V oraz 1 A dla napięcia 5-11,8 V. Pololu 2119
Komputer Raspberry Pi 3 model B (Quad Core Broadcom BCM2837, 4x1.2GHz rdzeń ARM Cortex-A53, RAM 1GB, 4xUSB, Ethernet, HDMI, Wifi, Bluetooth)
Niewielki silnik średniej mocy z metalową przekładnią 5:1, napięciem pracy 6 V, poborem prądu od 0,04 A do 0,67 A, prędkością 4400 RPM, maksymalnym momentem obrotowym 0,06 kg*cm i obustronnym wałem. Pololu 2376
Brak towaru
Niewielki silnik średniej mocy z metalową przekładnią 250:1, napięciem pracy 6 V, poborem prądu od 0,04 A do 0,67 A, prędkością 88 RPM, maksymalnym momentem obrotowym 2,2 kg*cm i obustronnym wałem. Pololu 2384
Komputer Raspberry Pi 3 model B+ (Quad Core Broadcom BCM2837B0, 4x1.4GHz rdzeń ARM Cortex-A53, RAM 1GB, 4xUSB, Ethernet, HDMI, Wi-Fi, Bluetooth BLE)
Moduł rozszerzeń dla Raspberry Pi. Umożliwia sterowanie dwoma silnikami DC, obsługę enkoderów, 4 serwomechanizmów, IMU 9DoF oraz podłączenie modułów Qwiic. SparkFun ROB-16328
Brak towaru
Moduł HAT ze sterownikiem silników TB6612FNG oraz sterownikiem PWM PCA9685 przeznaczony do minikomputerów Raspberry Pi. Płytka wyposażona została w złącza śrubowe. Adafruit 4280
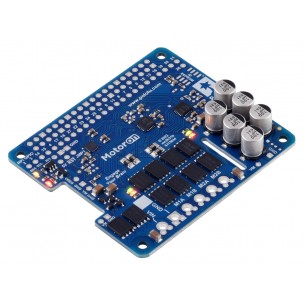
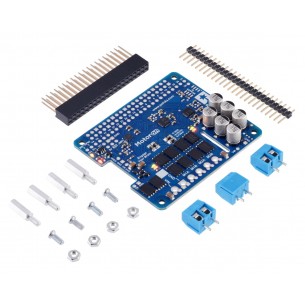
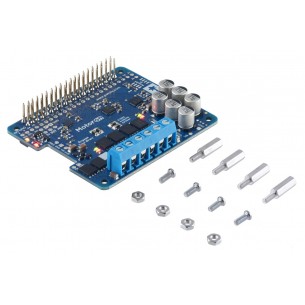
Moduł z 2-kanałowym sterownikiem silników DC TB6612FNG przeznaczony do współpracy z Raspberry Pi. Może pracować z napięciem od 6 do 12 V i natężeniem prądu do 3 A. SB Components 21468
Moduł z 4-kanałowym sterownikiem silników DC (2 x L293D) przeznaczony do współpracy z Raspberry Pi. Może pracować z napięciem od 6 do 24 V i natężeniem prądu do 600 mA. SB Components 08001
Oficjalny moduł rozszerzeń (HAT) dedykowany do Raspberry Pi. Pozwala na sterowanie silnikami LEGO SPIKE Prime i obsłguę czujników LEGO. Raspberry Pi SC0622
Sterownik silników DC, który pozwala na kontrolowanie ruchu trzech napędów za pomocą interfejsu I2C. Płytka z przylutowanymi złączami. Pololu 5033
Sterownik silników DC, który pozwala na kontrolowanie ruchu trzech napędów za pomocą interfejsu I2C. Złącza do samodzielnego montażu. Pololu 5034
Sterownik silników DC, który pozwala na kontrolowanie ruchu trzech napędów za pomocą interfejsu I2C. Pololu 5035
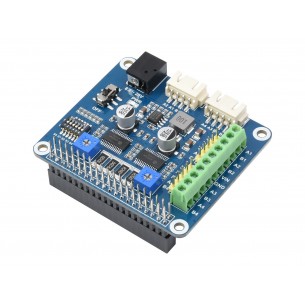
Moduł rozszerzeń ze sterownikiem dwóch silników krokowych oparty na układzie HR8825. Dedykowany dla minikomputerów Raspberry Pi. Waveshare Stepper Motor HAT (B)
Moduł rozszerzeń ze sterownikiem dwóch silników krokowych oparty na układzie DRV8825. Dedykowany dla minikomputerów Raspberry Pi. Waveshare Stepper Motor HAT
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka bez złączy. Pololu 5059
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Złącza do montażu. Pololu 5058
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka z przylutowanymi złączami. Pololu 5057
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka bez złączy. Pololu 5056
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka ze złączami do montażu. Pololu 5055
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka z przylutowanymi złączami. Pololu 5054
Brak towaru