











36,94 zł Netto
Aluminiowe podwozie 2WD z kółkiem podporowym. Może służyć jako baza do budowy niewielkiego robota mobilnego
Aluminiowe podwozie 2WD. Może służyć jako baza do budowy niewielkiego robota mobilnego. Wyposażone w dwa silniki DC o napięciu pracy od 4,5 V do 6 V oraz dwa koła i kulkę podporową. W obudowie wycięte zostały liczne otwory ułatwiające przymocowanie modułów elektronicznych.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Arduino Uno Rev3 to popularna płytka z mikrokontrolerem Atmel ATmega328 z rodziny AVR, do dyspozycji użytkownika jest 14 linii I/O, 6 kanałów PWM, 6 wejść analogowych. Dodatkowy mikrokontroler ATmega16U4 realizuje komunikację przez interfejs USB. Arduino A000066
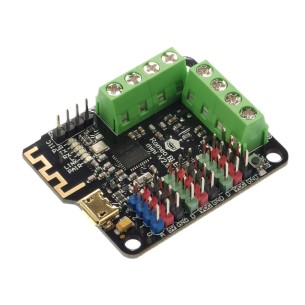
Zestaw ewaluacyjny z modułem Bluetooth 4.0. Ma 8 pinów cyfrowych, 4 piny analogowe i 4 PWM. Kompatybilny z Arduino, znakomicie nadaje się jako platforma do budowy małego robota. DFRobot DFR0351
Brak towaru
Płytka rozwojowa z mikrokontrolerem RP2040. Wyposażona w sterownik silników DC, serw oraz złącza Grove. Dedykowana do budowy robotów. Cytron MAKER-PI-RP2040
Aluminiowe podwozie 2WD z kółkiem podporowym. Może służyć jako baza do budowy niewielkiego robota mobilnego
Brak towaru
Aluminiowe podwozie 2WD z kółkiem podporowym. Może służyć jako baza do budowy niewielkiego robota mobilnego
Brak towaru
Zestaw do budowy podwozia 4WD w kształcie samochodu ze wzmocnionym podwoziem. Może służyć jako baza do budowy robota
Podwozie robota 2WD wykonane z pleksi z kompletem elementów montażowych (śruby, tulejki, nakrętki). W zestawie są silniki, koła 65 mm, kółka podporowe oraz koszyk na baterie
Zestaw do budowy podwozia 4WD w kształcie samochodu. Może służyć jako baza do budowy robota
Brak towaru
Zestaw do budowy podwozia 4WD w kształcie samochodu. Może służyć jako baza do budowy robota
Brak towaru
Złożone podwozie robota gąsienicowego, wyposażone w dwa silniki DC. Stanowi znakomitą bazę do budowy pojazdów zdalnie sterowanych. Może zostać wyposażony w dodatkowe czujniki czy elementy wykonawcze np. ramię robotyczne. W zestawie znajduje się również plastikowa obudowa (widoczna na drugim zdjęciu)
Brak towaru
Zestaw do budowy podwozia 2WD z kółkiem podporowym. Może służyć jako baza do budowy niewielkiego robota mobilnego.
Brak towaru
Aluminiowa platforma do budowy robota mobilnego. W płycie wykonano liczne otwory ułatwiające montaż silników i elektroniki
Brak towaru
Aluminiowa platforma o średnicy 140 mm to solidna i uniwersalna podstawa do budowy robotów mobilnych. Liczne otwory ułatwiają integrację komponentów, a odporność mechaniczna zapewnia trwałość w warunkach warsztatowych i terenowych.
Okrągła aluminiowa platforma z dodatkowymi wycięciami to uniwersalna baza do budowy robotów mobilnych. Ułatwia montaż elementów i prowadzenie instalacji, zapewniając jednocześnie trwałość i elastyczność konstrukcyjną.
Aluminiowa platforma do budowy robota mobilnego. W płycie wykonano liczne otwory ułatwiające montaż silników i elektroniki
Czterokołowe podwozie samochodowe do samodzielnego montażu. Zestaw zawiera wszystkie niezbędne elementy mechaniczne, które są potrzebne do budowy tego typu konstrukcji
Brak towaru
Aluminiowe podwozie 2WD z kółkiem podporowym. Może służyć jako baza do budowy niewielkiego robota mobilnego
Brak towaru
Aluminiowe podwozie 2WD z kółkiem podporowym. Może służyć jako baza do budowy niewielkiego robota mobilnego
Brak towaru
Aluminiowe podwozie 2WD z kółkiem podporowym. Może służyć jako baza do budowy niewielkiego robota mobilnego
Brak towaru
Podwozie robota mobilnego wyposażone w napęd na cztery koła. Modułowa budowa pozwala na łatwy rozwój projektu. Idealne do budowy pierwszego robota mobilnego. Waveshare Robot-Chassis-NS
Brak towaru
Sześciokołowe mobilne podwozie robota przeznaczone do projektów wymagających jazdy po wymagającym terenie. Wykorzystuje sterownik oparty o ESP32 oraz zestaw czujników IMU. Może być łatwo rozbudowany o dodatkowe elementy np. ramię robotyczne, kamerę lub LIDAR. Waveshare UGV02 (EU)
Brak towaru
Aluminiowe podwozie 2WD z kółkiem podporowym. Może służyć jako baza do budowy niewielkiego robota mobilnego