")
")
")
")

87,21 zł Netto
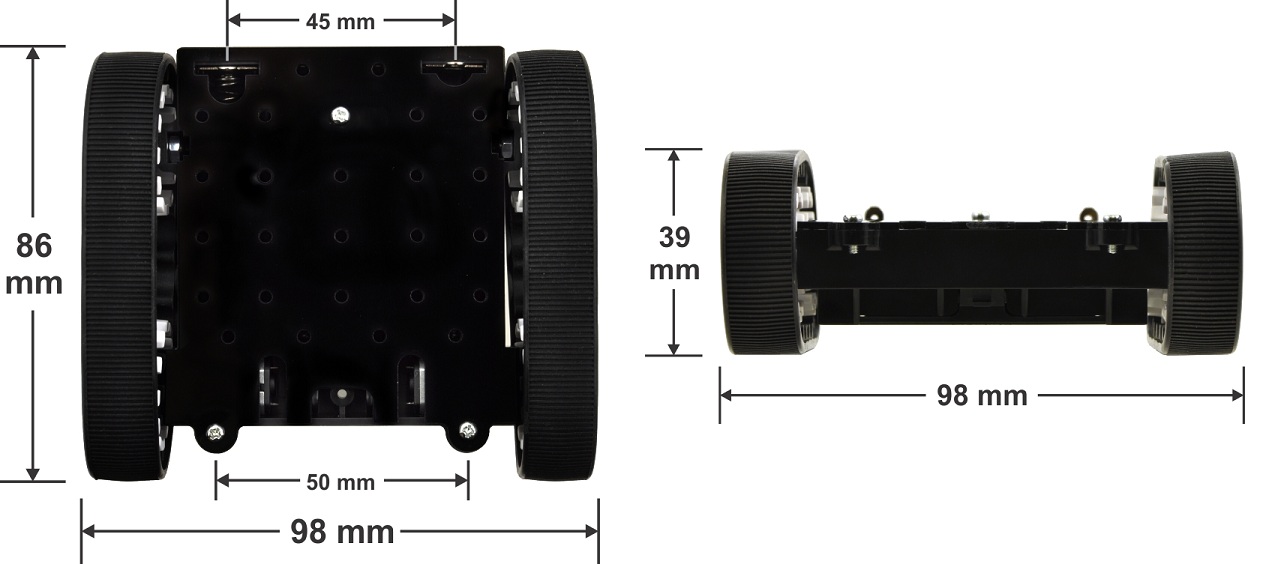
Zestaw do budowy podwozia gąsienicowego do robota minisumo Pololu Zumo. Zestaw nie zawiera silników, baterii ani elementów elektronicznych. Pololu 1418
Zestaw do budowy podwozia do robota klasy minisumo od Pololu. Platforma przeznaczona do użytku z kontrolerem Arduino lub kompatybilnym urządzeniem, np. A-Star 32U4 Prime. Wymiary kompletnego robota (98 x 98 x 39 mm) oraz waga (300 g z bateriami i kontrolerem) pozwalają na użycie robota jako platformy minisumo w popularnych zawodach dla uczniów i studentów organizowanych na całym świecie.
Zestaw zawiera elementy mechaniczne: zestaw gąsienic, obudowę oraz elementy montażowe.
Uwaga!
Zestaw nie zawiera, silników, sterownika Arduino, elektroniki, spychacza ani baterii AA niezbędnych do uruchomienia robota. Należy je zakupić oddzielnie.Robot ma szerokie wsparcie w postaci bibliotek Arduino dla wszystkich układów dostępnych na płytce. Dostępny jest również w wersji z elektroniką jako zestaw do samodzielnego montażu lub zestaw złożonego robota.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Niewielki silnik dużej mocy z metalową przekładnią 100:1, napięciem pracy 6 V, poborem prądu od 0,07 A do 1,6 A, prędkością 310 RPM i maksymalnym momentem obrotowym 1,7 kg*cm. Pololu 1101
Brak towaru
Spychacz przeznaczony do użytku z podwoziem Zumo i dołączone jako część zmontowanego robota Zumo. Spychacz wykonany został z grubej, wycinanej laserowo stali nierdzewnej o grubości 0,91 mm i jest dostarczany bez wygiętych blaszek mocujących. Pololu 1410
Brak towaru
Niewielki silnik dużej mocy z metalową przekładnią 75:1, napięciem pracy 6 V, poborem prądu od 0,07 A do 1,6 A, prędkością 410 RPM i maksymalnym momentem obrotowym 1,3 kg*cm. Pololu 2361
Arduino Uno Rev3 to popularna płytka z mikrokontrolerem Atmel ATmega328 z rodziny AVR, do dyspozycji użytkownika jest 14 linii I/O, 6 kanałów PWM, 6 wejść analogowych. Dodatkowy mikrokontroler ATmega16U4 realizuje komunikację przez interfejs USB. Arduino A000066
Moduł matrycy sześciu czujników odbiciowych przeznaczony do robota Zumo. Moduł umożliwia dodanie w łatwy sposób wykrywania linii lub wykrywania krawędzi do robota. Pololu 1419
Wszechstronna płyta rozwojowa z mikrokontrolerem ATmega328P, która dzięki swojej kompatybilności z Arduino UNO i różnorodności funkcji, jest doskonałym wyborem do wielu projektów
Zestaw do budowy podwozia gąsienicowego do robota minisumo Pololu Zumo. Zestaw nie zawiera silników, baterii ani elementów elektronicznych. Pololu 1418
Spychacz przeznaczony do użytku z podwoziem Zumo i dołączone jako część zmontowanego robota Zumo. Spychacz wykonany został z grubej, wycinanej laserowo stali nierdzewnej o grubości 0,91 mm i jest dostarczany bez wygiętych blaszek mocujących. Pololu 1410
Brak towaru
Zestaw do budowy podwozia gąsienicowego do robota minisumo Pololu Zumo. Zestaw nie zawiera silników, baterii ani elementów elektronicznych. Pololu 1418