








")

404,56 zł Netto
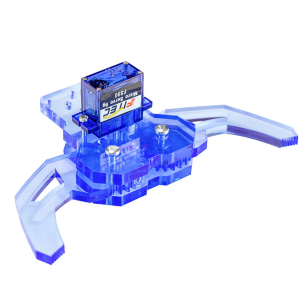
Zestaw ramienia robota to dodatek do platformy Romi Chassis, umożliwiający manipulowanie małymi obiektami. Zestaw zawiera mikro-chwytak, ramiona podtrzymujące chwytak i platformę do montażu. Pololu 3550
Robot Arm Kit to zestaw ramienia robota przeznaczony do platformy Romi Chassis, umożliwiający manipulowanie małymi obiektami. Zestaw zawiera mikro-chwytak z łopatkami, które mogą przesuwać się w odległości do 32 mm, ramiona podtrzymujące chwytak i platformę do montażu. Zespół jest sterowany przez trzy dołączone serwa, które są specjalnie zmodyfikowane, aby zapewnić dostęp do swoich potencjometrów sprzężenia zwrotnego za pośrednictwem czwartego (zielonego) przewodu. Informacja zwrotna umożliwia bardziej złożone sterowanie ramieniem w pętli z głównego kontrolera.
Ramię montowane jest na tylnej połowie podwozia Romi Chassis, tuż nad silnikami, za pomocą dołączonych aluminiowych elementów dystansowych. Większe serwomechanizmy mogą krótko pracować z maksymalnym prądem 1,8 A. Prąd mikro serwa to w przybliżeniu 0,8 A przy 6 V. Wszystkie trzy serwa są zasilane napięciem od 4,8 V do 6 V, mogą być zasilane z poziomu baterii lub zewnętrznego zasilacza. Maksymalna zalecana ładowność ramienia wynosi 100 g, a chwytak może otwierać się do maksymalnej szerokości 32 mm.
Uwaga!
Pełen zakres ruchu serwa chwytaka wymaga pulsacji pomiędzy 0,5 ms (całkowicie otwarty) a 2,4 ms (całkowicie zamknięty), co wykracza poza standardowy zakres serwomechanizmu od 1 ms do 2 ms. Należy upewnić się, że elektronika sterująca jest w stanie generować takie sygnały, jeśli zależy Ci na uzyskaniu pełnego zakresu ruchu.Uwaga!
Widoczne na filmie podwozie Romi Chassis, nie wchodzi w skład zestawu należy je nabyć osobno.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Podwozie Romi Chassis Kit to idealna baza do budowy niewielkiego robota mobilnego. W zestawie znajdziemy wszystkie niezbędne elementy mechaniczne do budowy kołowego robota mobilnego. Zestaw do samodzielnego montażu. Pololu 3500
Podwozie Romi Chassis Kit to idealna baza do budowy niewielkiego robota mobilnego. W zestawie znajdziemy wszystkie niezbędne elementy mechaniczne do budowy kołowego robota mobilnego. Zestaw do samodzielnego montażu. Pololu 3509
Brak towaru
Kulka podporowa wraz z mocowaniem przeznaczona do podwozia Romi Chassis. Pololu 3539
Brak towaru
Romi 32U4 Control Board to sterownik dedykowany dla podwozia Romi Chassis. Posiada mikrokontroler ATmega32u4 który można programować w środowisku IDE Arduino. Posiada dwukanałowy sterownik silników, złącza do podłączenia enkoderów, czy wyświetlacza LCD. Odpowiednie złącze pozwala na integracje z komputerem Raspberry Pi. Pololu 3544
Brak towaru
Bioniczna dłoń sterowana za pomocą serwomechanizmów. Wykonana jest z materiału akrylowego, pozwala na sterowanie każdym palcem z osobna. DFRobot ROB0142
Brak towaru
Bioniczna dłoń sterowana za pomocą serwomechanizmów. Wykonana jest z materiału akrylowego, pozwala na sterowanie każdym palcem z osobna. DFRobot ROB0143
Brak towaru
Zestaw ramienia robota to dodatek do platformy Romi Chassis, umożliwiający manipulowanie małymi obiektami. Zestaw zawiera mikro-chwytak, ramiona podtrzymujące chwytak i platformę do montażu. Pololu 3550
Brak towaru
Niewielkich rozmiarów chwytak napędzany serwomechanizmem o zakresie ruchu wynoszącym 32 mm. Zawiera specjalne mikro serwo z dodatkowym przewodem, który daje dostęp do jego sprzężenia zwrotnego, dzięki czemu można śledzić rzeczywistą pozycję łopatek chwytaka. Pololu 3551
Brak towaru
Zestaw do samodzielnego montażu ramienia robotycznego o czterech stopniach swobody (4DOF) wyposażone w serwomechnizmy MG90S. Ramię na końcu posiada niewielki chwytak co pozwala na łapanie oraz przenoszenie niewielkich przedmiotów.Ramię sterowanie za pomocą płytki zgodnej z Arduino Uno lub modułu z potencjometrami.
Chwytak robotyczny zbudowany na bazie serwa SG92R. Ma kąt otwierania i zamykania 90° i otwory montażowe kompatybilne z Lego. M5Stack U102
Zestaw do montażu ramienia robotycznego o czterech stopniach swobody (4DOF). Manipulator oparty został na serwomechanizmach i jest sterowany bezprzewodowo za pomocą Raspberry Pi. Waveshare Robot Arm for Pi (for Europe)
Brak towaru
Ramię robotyczne 5 DoF zbudowane na bazie serwomechanizmów i ESP32. Może być sterowane bezprzewodowo przez WiFi i przeglądarkę internetową lub interfejs USB. Waveshare RoArm-M1 (EU)
Brak towaru
Ramię robotyczne o czterech stopniach swobody (4 DoF) zbudowane na bazie serwomechanizmów i sterownika z modułem ESP32. Może być sterowane bezprzewodowo przez WiFi i przeglądarkę internetową lub interfejs USB. Waveshare RoArm-M2-S (EU)
Brak towaru
Nowa wersja popularnego chwytaka Kitronik Klaw, doskonała do projektów robotycznych i pojazdów typu buggy. Kompatybilny z MOVE Mk1 i Mk2, umożliwia precyzyjne chwytanie przedmiotów za pomocą serwomechanizmu, zapewniając łatwość montażu i szerokie możliwości zastosowania w robotyce. Kitronik 25104
Kompaktowy robot współpracujący 4-osiowy o powtarzalności ±0,05 mm, przeznaczony do precyzyjnych zadań automatyzacji przy niskich kosztach. Oferuje zasięg 44 cm, udźwig do 500 g oraz intuicyjne funkcje, takie jak wykrywanie kolizji i drag-to-teach. Dzięki bogatym interfejsom I/O (Ethernet, USB, cyfrowe wejścia/wyjścia, pneumatyka) i kompaktowej konstrukcji świetnie sprawdza się w montażu, pakowaniu, obsłudze laboratoryjnej i edukacji. Pololu 5400
Brak towaru
Ramie robotyczne RoArm-M2-Pro (EU) zapewnia cztery stopnie swobody, wysoką precyzję sterowania i dużą elastyczność rozbudowy dzięki otwartej architekturze opartej na ESP32. Wersja Pro, wyposażona w całkowicie metalowe serwomechanizmy ST3235, oferuje zwiększoną wytrzymałość oraz dokładność powtarzalnych ruchów. Produkt przeznaczony do zastosowań edukacyjnych, badawczo-rozwojowych i prototypowania, umożliwia obsługę różnych scenariuszy z użyciem mobilnych platform, systemów ROS2 oraz wizualizacji 3D. Dzięki rozbudowanej dokumentacji i otwartym zasobom, ramię może służyć jako fundament dla zaawansowanych projektów w dziedzinie automatyki i robotyki.
Brak towaru
Gripper-A Waveshare 30385 to solidny i opłacalny wybór dla konstruktorów ramion robotycznych, oferujący pełną kontrolę w pętli sprzężenia zwrotnego i funkcje zabezpieczające serwo. Dzięki uniwersalnej konstrukcji, regulowanym szczękom i możliwości integracji z kamerą znajduje zastosowanie w edukacyjnych, laboratoryjnych i półprzemysłowych projektach robotyki manipulacyjnej.
Brak towaru
Chwytak Gripper-B Waveshare 30386 z serwem CF35-12 zapewnia zaawansowaną funkcjonalność uchwytu dla ramion robotycznych dzięki precyzyjnej kontroli siły, sprzężeniu zwrotnemu i ochronie w czasie rzeczywistym. Obudowa ze stopu aluminium i stali nierdzewnej oraz możliwość regulacji uchwytu i rozbudowy o systemy wizyjne czynią go idealnym komponentem do zastosowań przemysłowych, badawczych i edukacyjnych w dziedzinie robotyki.
Brak towaru
RoArm-M3-S (EU) to wszechstronne ramię robotyczne, idealne dla edukatorów, twórców i badaczy. Dzięki szerokiej gamie opcji sterowania, wsparciu dla AI oraz kompletnej dokumentacji, umożliwia szybkie wdrożenie w zaawansowanych projektach edukacyjnych, prototypowych i eksperymentalnych. Wersja z zasilaczem EU gotowa do pracy zaraz po rozpakowaniu.
Brak towaru
RoArm-M3-Pro (EU) to w pełni funkcjonalne ramię robotyczne z zaawansowaną kontrolą opartą na ESP32, gotowe do integracji z projektami AI, ROS2 i środowiskami edukacyjnymi. Oferuje bogaty zestaw funkcji w zakresie sterowania, rozwoju algorytmów oraz fizycznej manipulacji, a dzięki dostarczonemu zasilaczowi EU nadaje się do natychmiastowego uruchomienia w środowiskach europejskich.
Brak towaru
Zestaw ramienia robota to dodatek do platformy Romi Chassis, umożliwiający manipulowanie małymi obiektami. Zestaw zawiera mikro-chwytak, ramiona podtrzymujące chwytak i platformę do montażu. Pololu 3550