767,60 zł Netto
Ramię robotyczne o czterech stopniach swobody (4 DoF) zbudowane na bazie serwomechanizmów i sterownika z modułem ESP32. Może być sterowane bezprzewodowo przez WiFi i przeglądarkę internetową lub interfejs USB. Waveshare RoArm-M2-S (EU)
Ramię robotyczne (manipulator) o 4 stopniach swobody (4 DoF). Zbudowany został w oparciu o serwomechanizmy sterowane przez interfejs szeregowy UART oraz moduł ESP32-WROOM-32, który zapewnia komunikację WiFi i Bluetooth. Sterowany jest bezprzewodowo przy pomocy przeglądarki internetowej.
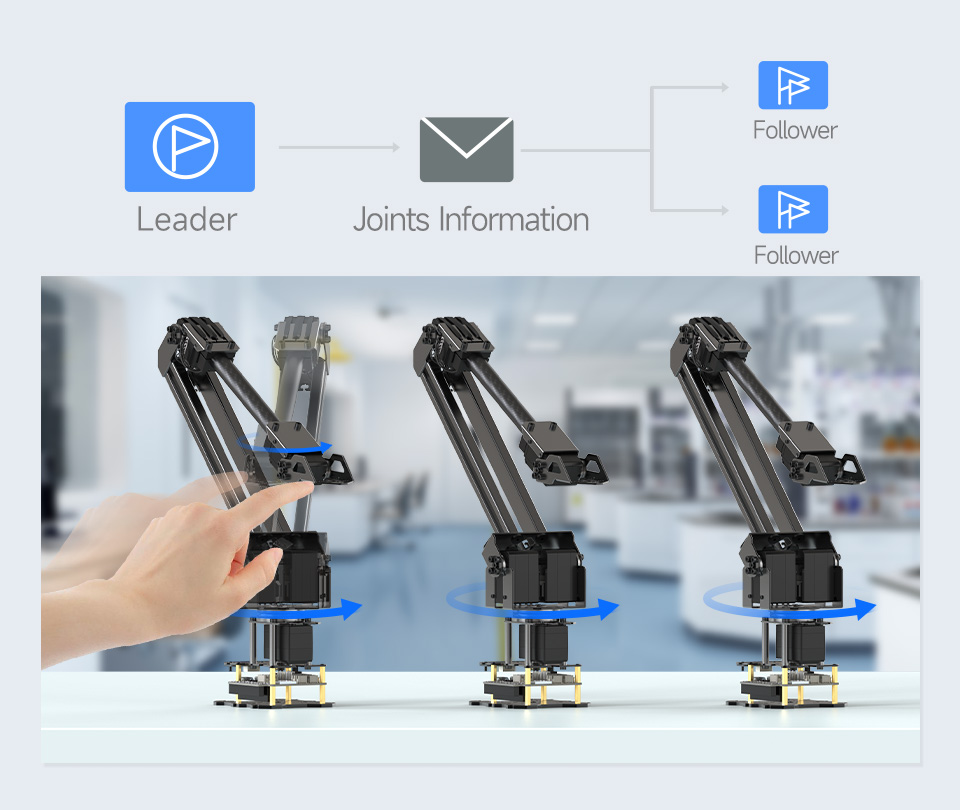
Wykorzystanie czterech przegubów o szerokim zakresie obrotu oraz zaimplementowane algorytmy kinematyki odwrotnej i płynnej regulacji prędkości zapewniają bardzo płynny ruch z łagodnym startem i zatrzymaniem. Manipulator może poruszać się w trybie regulacji kata obrotu lub trybie sterowania współrzędnymi XYZ chwytaka. Obsługuje tryb "podążania" oparty na ESP-NOW oraz tryb nagrywania i odtwarzania ruchu.
Do sterowania manipulatorem producent dostarcza dedykowaną aplikację dostępną na różnego typu platformy, w tym komputery PC, tablety czy smartfony. Nie wymaga ona instalacji i jest uruchamiana w przeglądarce internetowej, dzięki czemu można w łatwy i szybki sposób rozpocząć zabawę.

Sterownik oparty został o moduł ESP32-WROOM-32 wyposażony w komunikację WiFi 2,4 GHz oraz Bluetooth 4.2. Odpowiada on za sterowanie serwomechanizmami oraz realizację wbudowanych algorytmów. Może być podłączony przez USB do komputera PC, Raspberry Pi czy Jetson Nano.
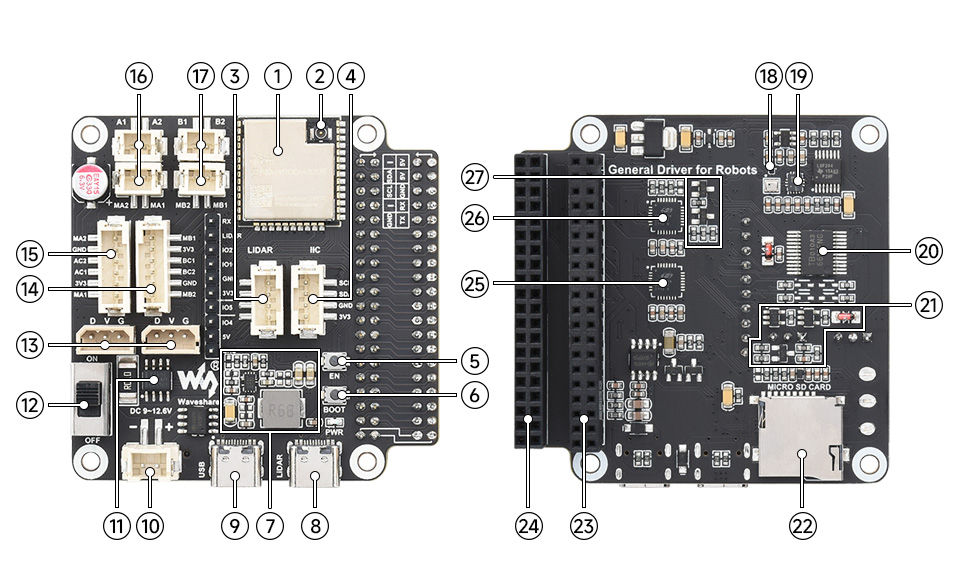
| 1. ESP32-WROOM-32 | 15. Interfejs silników PH2.0 6P |
| 2. Złącze IPEX1 WIFI | 16. Interfejs silników PH2.0 6P |
| 3. Interfejs LIDAR | 17. Interfejs silników PH2.0 6P |
| 4. Interfejs I2C | 18. AK09918C |
| 5. RESET | 19. QMI8658C |
| 6. Przycisk aktualizacji | 20. TB6612FNG |
| 7. Obwód zasilania | 21. Obwód sterowania serw |
| 8. USB typu C (LADAR) | 22. Gniazdo Micro SD |
| 9. USB typu C (USB) | 23. 40-pin GPIO |
| 10. Port zasilania | 24. Złącze 40-pin |
| 11. INA219 | 25. USB-UART CP-2102 |
| 12. ON/OFF zasilania | 26. USB-UART CP-2102 |
| 13. Interfejs serw ST3215 | 27. Obwód aktualizacji |
| 14. Interfejs silników PH2.0 6P |
Konstrukcja manipulatora wykonana została z aluminium (korpus) oraz włókna węglowego. Do wykonania chwytaka wykorzystano stal nierdzewną . Wysoka jakość materiałów oraz wykonania zapewnia stabilność, wytrzymałość i trwałość konstrukcji.
Producent oferuje bogate wsparcie w postaci poradników dla ROS2 oraz innych materiałów edukacyjnych. Pełna dokumentacja dostępna jest na stronie produktu.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Miniaturowa wersja komputera Raspberry Pi wyposażona w SiP BCM2710A1 - 4x ARM Cortex-A53 1GHz bliżniaczym z Raspberry Pi 3 i 512 MB pamięci RAM oraz łączność bezprzewodową WiFi 802.11 b/g/n + Bluetooth 4.2/BLE
Brak towaru
Sześciokołowe mobilne podwozie robota przeznaczone do projektów wymagających jazdy po wymagającym terenie. Wykorzystuje sterownik oparty o ESP32 oraz zestaw czujników IMU. Może być łatwo rozbudowany o dodatkowe elementy np. ramię robotyczne, kamerę lub LIDAR. Waveshare UGV02 (EU)
Brak towaru
Mobilne podwozie robota z napędem na 4 koła, wykonane w całości z metalu, charakteryzujące się doskonałą zdolnością do pokonywania przeszkód w terenie, a także otwartym kodem źródłowym do wtórnego rozwoju. Waveshare 25377
Brak towaru
Zestaw ramienia robota to dodatek do platformy Romi Chassis, umożliwiający manipulowanie małymi obiektami. Zestaw zawiera mikro-chwytak, ramiona podtrzymujące chwytak i platformę do montażu. Pololu 3550
Brak towaru
Niewielkich rozmiarów chwytak napędzany serwomechanizmem o zakresie ruchu wynoszącym 32 mm. Zawiera specjalne mikro serwo z dodatkowym przewodem, który daje dostęp do jego sprzężenia zwrotnego, dzięki czemu można śledzić rzeczywistą pozycję łopatek chwytaka. Pololu 3551
Brak towaru
Zestaw do samodzielnego montażu ramienia robotycznego o czterech stopniach swobody (4DOF) wyposażone w serwomechnizmy MG90S. Ramię na końcu posiada niewielki chwytak co pozwala na łapanie oraz przenoszenie niewielkich przedmiotów.Ramię sterowanie za pomocą płytki zgodnej z Arduino Uno lub modułu z potencjometrami.
Brak towaru
Chwytak robotyczny zbudowany na bazie serwa SG92R. Ma kąt otwierania i zamykania 90° i otwory montażowe kompatybilne z Lego. M5Stack U102
Zestaw do montażu ramienia robotycznego o czterech stopniach swobody (4DOF). Manipulator oparty został na serwomechanizmach i jest sterowany bezprzewodowo za pomocą Raspberry Pi. Waveshare Robot Arm for Pi (for Europe)
Brak towaru
Ramię robotyczne 5 DoF zbudowane na bazie serwomechanizmów i ESP32. Może być sterowane bezprzewodowo przez WiFi i przeglądarkę internetową lub interfejs USB. Waveshare RoArm-M1 (EU)
Brak towaru
Ramię robotyczne o czterech stopniach swobody (4 DoF) zbudowane na bazie serwomechanizmów i sterownika z modułem ESP32. Może być sterowane bezprzewodowo przez WiFi i przeglądarkę internetową lub interfejs USB. Waveshare RoArm-M2-S (EU)
Brak towaru
Nowa wersja popularnego chwytaka Kitronik Klaw, doskonała do projektów robotycznych i pojazdów typu buggy. Kompatybilny z MOVE Mk1 i Mk2, umożliwia precyzyjne chwytanie przedmiotów za pomocą serwomechanizmu, zapewniając łatwość montażu i szerokie możliwości zastosowania w robotyce. Kitronik 25104
Kompaktowy robot współpracujący 4-osiowy o powtarzalności ±0,05 mm, przeznaczony do precyzyjnych zadań automatyzacji przy niskich kosztach. Oferuje zasięg 44 cm, udźwig do 500 g oraz intuicyjne funkcje, takie jak wykrywanie kolizji i drag-to-teach. Dzięki bogatym interfejsom I/O (Ethernet, USB, cyfrowe wejścia/wyjścia, pneumatyka) i kompaktowej konstrukcji świetnie sprawdza się w montażu, pakowaniu, obsłudze laboratoryjnej i edukacji. Pololu 5400
Brak towaru
Ramie robotyczne RoArm-M2-Pro (EU) zapewnia cztery stopnie swobody, wysoką precyzję sterowania i dużą elastyczność rozbudowy dzięki otwartej architekturze opartej na ESP32. Wersja Pro, wyposażona w całkowicie metalowe serwomechanizmy ST3235, oferuje zwiększoną wytrzymałość oraz dokładność powtarzalnych ruchów. Produkt przeznaczony do zastosowań edukacyjnych, badawczo-rozwojowych i prototypowania, umożliwia obsługę różnych scenariuszy z użyciem mobilnych platform, systemów ROS2 oraz wizualizacji 3D. Dzięki rozbudowanej dokumentacji i otwartym zasobom, ramię może służyć jako fundament dla zaawansowanych projektów w dziedzinie automatyki i robotyki.
Brak towaru
Gripper-A Waveshare 30385 to solidny i opłacalny wybór dla konstruktorów ramion robotycznych, oferujący pełną kontrolę w pętli sprzężenia zwrotnego i funkcje zabezpieczające serwo. Dzięki uniwersalnej konstrukcji, regulowanym szczękom i możliwości integracji z kamerą znajduje zastosowanie w edukacyjnych, laboratoryjnych i półprzemysłowych projektach robotyki manipulacyjnej.
Brak towaru
Chwytak Gripper-B Waveshare 30386 z serwem CF35-12 zapewnia zaawansowaną funkcjonalność uchwytu dla ramion robotycznych dzięki precyzyjnej kontroli siły, sprzężeniu zwrotnemu i ochronie w czasie rzeczywistym. Obudowa ze stopu aluminium i stali nierdzewnej oraz możliwość regulacji uchwytu i rozbudowy o systemy wizyjne czynią go idealnym komponentem do zastosowań przemysłowych, badawczych i edukacyjnych w dziedzinie robotyki.
Brak towaru
RoArm-M3-S (EU) to wszechstronne ramię robotyczne, idealne dla edukatorów, twórców i badaczy. Dzięki szerokiej gamie opcji sterowania, wsparciu dla AI oraz kompletnej dokumentacji, umożliwia szybkie wdrożenie w zaawansowanych projektach edukacyjnych, prototypowych i eksperymentalnych. Wersja z zasilaczem EU gotowa do pracy zaraz po rozpakowaniu.
Brak towaru
RoArm-M3-Pro (EU) to w pełni funkcjonalne ramię robotyczne z zaawansowaną kontrolą opartą na ESP32, gotowe do integracji z projektami AI, ROS2 i środowiskami edukacyjnymi. Oferuje bogaty zestaw funkcji w zakresie sterowania, rozwoju algorytmów oraz fizycznej manipulacji, a dzięki dostarczonemu zasilaczowi EU nadaje się do natychmiastowego uruchomienia w środowiskach europejskich.
Brak towaru
Ulepszona wersja edukacyjnego ramienia robotycznego, zaprojektowana z myślą o nauce przez imitację i integracji z platformami LeRobot oraz Hugging Face. Zestaw zawiera serwomotory, adaptery i okablowanie (bez elementów drukowanych 3D), oferując gotowe rozwiązanie do szybkiego prototypowania systemów AI w środowisku rzeczywistym. Udoskonalone mechanizmy oraz wsparcie dla komputerów Nvidia Orin NX czynią go idealnym narzędziem do zastosowań badawczych, edukacyjnych i eksperymentów z uczeniem wzmacnianym. Seeed Studio 114993667
RoArm-M3-Pro-AI-Kit to otwartoźródłowy zestaw ramienia robotycznego klasy AI, gotowy do integracji z platformami Jetson Orin lub PC, wspierający zaawansowane algorytmy sterowania i uczenia maszynowego. Dzięki wzmocnionej konstrukcji i precyzyjnemu sterowaniu sprawdzi się w zastosowaniach edukacyjnych, badawczo-rozwojowych i projektach z dziedziny robotyki mobilnej i przemysłowej.
Brak towaru
Ramię robotyczne o czterech stopniach swobody (4 DoF) zbudowane na bazie serwomechanizmów i sterownika z modułem ESP32. Może być sterowane bezprzewodowo przez WiFi i przeglądarkę internetową lub interfejs USB. Waveshare RoArm-M2-S (EU)