





- Obecnie brak na stanie







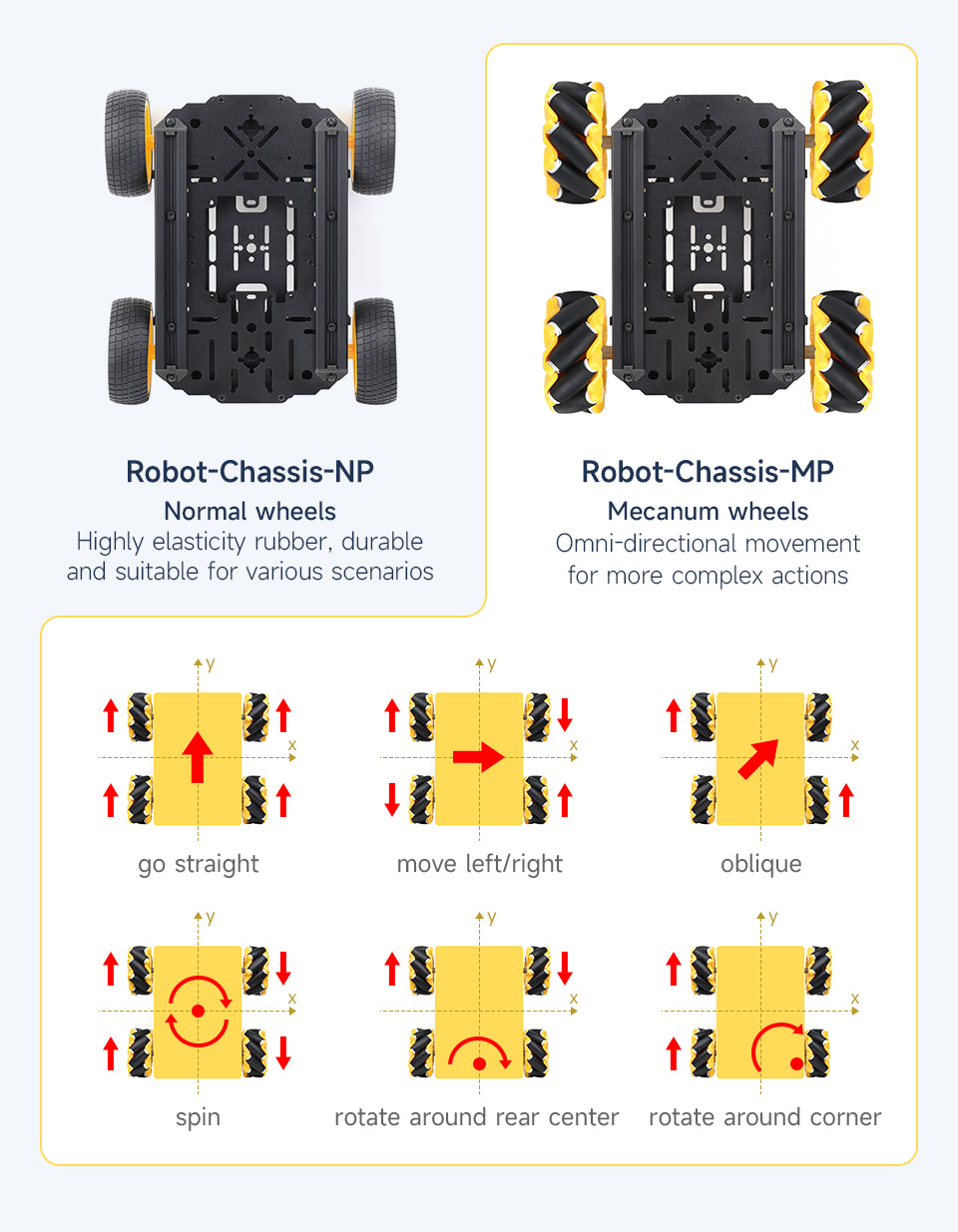
Podwozie robota mobilnego wyposażone w napęd na cztery koła typu Mecanum. Konstrukcja oparta o amortyzatory absorbuje wstrząsy i drgania, a modułowa budowa pozwala na łatwy rozwój projektu. Idealne do budowy pierwszego robota mobilnego. Waveshare Robot-Chassis-MP
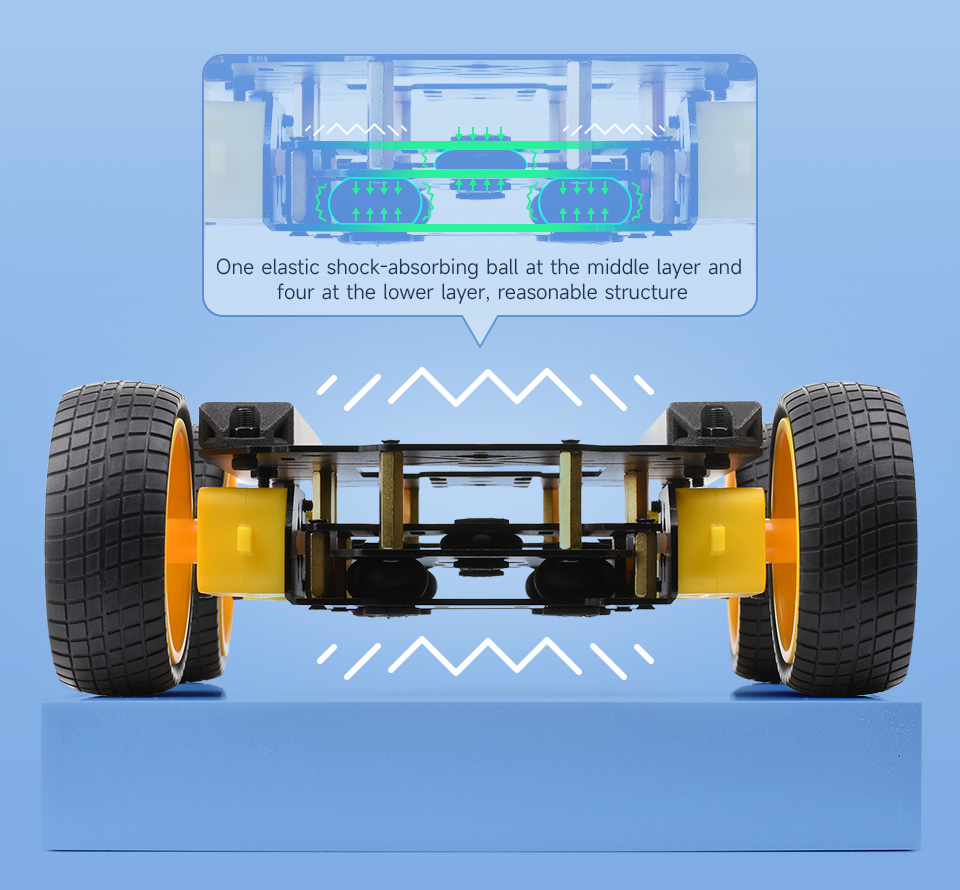
Podwozie robota mobilnego wyposażone w napęd na cztery koła typu Mecanum. Konstrukcja jest oparta o amortyzatory, które absorbują wstrząsy i drgania. Wraz ze stabilnym i mocnym napędem przekłada się to na wyższy poziom komfortu jazdy oraz mniejsze zużycie elementów robota. Metalowe elementy, z których zbudowane jest podwozie, zapewniają dużą wytrzymałość i odporność na uszkodzenia mechaniczne.
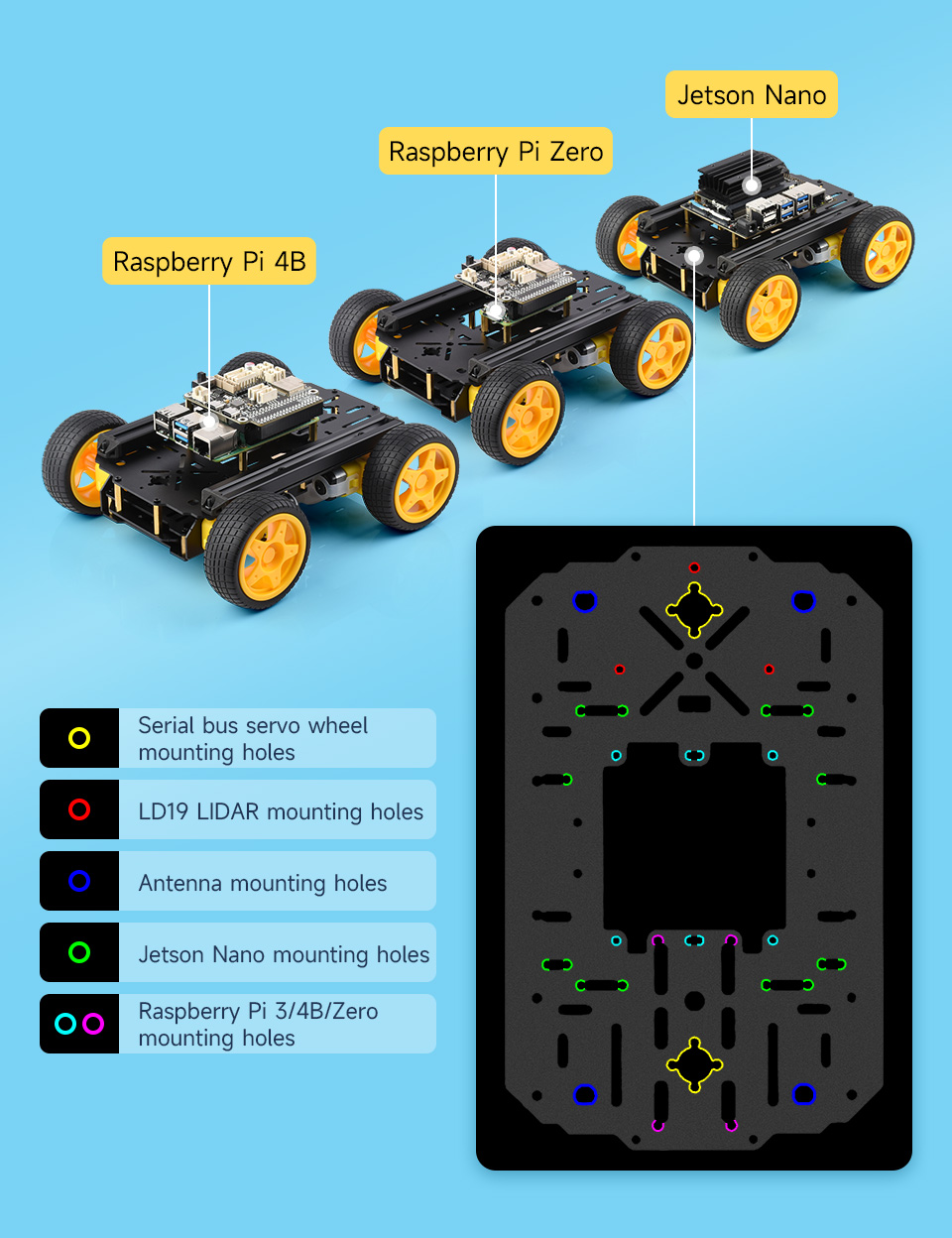
Aluminiowa szyna, która jest zintegrowana z podwoziem, umożliwia łatwe i szybkie montowanie podzespołów robota. Poza tym w zestawie dostępna jest dodatkowa płytka montażowa, która pozwala na jeszcze większą swobodę w rozmieszczeniu poszczególnych elementów takich, jak sterownik czy czujniki.
Koła Mecanum zapewniają większe możliwości sterowania, umożliwiając poruszanie się robotem nie tylko do przodu i tyłu, ale także na boki. Daje to jeszcze większą elastyczność podczas przemieszczania się w ciasnych przestrzeniach.
Podwozie jest łatwe w montażu, a modułowa budowa umożliwia szybkie zmiany. Dostępność plików projektowych pozwala użytkownikom na rozwijanie podwozia zgodnie ze swoimi potrzebami, a przez to jeszcze większą personalizację robota. Konstrukcja może posłużyć do budowy robota mobilnego, zdalnie sterowanego pojazdu lub wielozadaniowej platformy jezdnej. Pełna dokumentacja wraz z przykładami zastosowania dostępna jest na stronie produktu.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Sterownik robotów oparty na module ESP32-WROOM-32. Zapewnia szeroki zakres funkcjonalności i wsparcia dla różnych zastosowań, w tym komunikację bezprzewodową WiFi, Bluetooth oraz ESP-NOW. Waveshare General Driver for Robots
Brak towaru
Machine Screw: #4-40, 5/16" Length, Phillips (25-pack)
Brak towaru
Brak towaru
Machine Screw: #2-56, 1/4" Length, Phillips (25-pack)
Brak towaru
Tulejka dystansowa walcowa o średnicy wewnętrznej 3.3mm i zewnętrznej 5mm, długość tulejki 2mm. Tulejka wykonana z nylonu. Zestaw zawiera 50 sztuk. Pololu 1980
Brak towaru
Tulejka dystansowa walcowa o średnicy wewnętrznej 3.3mm i zewnętrznej 5mm, długość tulejki 4mm. Tulejka wykonana z nylonu. Zestaw zawiera 50 sztuk. Pololu 1981
Brak towaru
Tulejka dystansowa walcowa o średnicy wewnętrznej 3.3mm i zewnętrznej 5mm, długość tulejki 6mm. Tulejka wykonana z nylonu. Zestaw zawiera 50 sztuk. Pololu 1982
Brak towaru
Tulejka dystansowa walcowa o średnicy wewnętrznej 3.3mm i zewnętrznej 5mm, długość tulejki 8mm. Tulejka wykonana z nylonu. Zestaw zawiera 50 sztuk. Pololu 1983
Brak towaru
Tulejka dystansowa walcowa o średnicy wewnętrznej 3.3mm i zewnętrznej 5mm, długość tulejki 10mm. Tulejka wykonana z nylonu. Zestaw zawiera 25 sztuk. Pololu 1984
Brak towaru
Tulejka dystansowa walcowa o średnicy wewnętrznej 3.3mm i zewnętrznej 5mm, długość tulejki 12mm. Tulejka wykonana z nylonu. Zestaw zawiera 25 sztuk. Pololu 1985
Brak towaru
Tulejka dystansowa walcowa o średnicy wewnętrznej 3.3mm i zewnętrznej 5mm, długość tulejki 15mm. Tulejka wykonana z nylonu. Zestaw zawiera 25 sztuk. Pololu 1986
Brak towaru
Tulejka dystansowa walcowa o średnicy wewnętrznej 3.3mm i zewnętrznej 5mm, długość tulejki 20mm. Tulejka wykonana z nylonu. Zestaw zawiera 10 sztuk. Pololu 1987
Brak towaru
Tulejka dystansowa walcowa o średnicy wewnętrznej 3.3mm i zewnętrznej 5mm, długość tulejki 25mm. Tulejka wykonana z nylonu. Zestaw zawiera 10 sztuk. Pololu 1988
Brak towaru
Machine Screw: #4-40, 1/4" Length, Phillips (25-pack)
Brak towaru
9.7:1 Metal Gearmotor 25Dx48L mm HP with 48 CPR Encoder
Brak towaru
9.7:1 Metal Gearmotor 25Dx48L mm with 48 CPR Encoder
Brak towaru
34:1 Metal Gearmotor 25Dx52L mm with 48 CPR Encoder
Brak towaru
Podwozie robota mobilnego wyposażone w napęd na cztery koła typu Mecanum. Konstrukcja oparta o amortyzatory absorbuje wstrząsy i drgania, a modułowa budowa pozwala na łatwy rozwój projektu. Idealne do budowy pierwszego robota mobilnego. Waveshare Robot-Chassis-MP
















