- Obecnie brak na stanie




Dariusz Kościelnik
| Autor: Dariusz Kościelnik ISBN: 83-206-1599-2 Format: B5, 372 str. Twarda oprawa Wydawnictwo: WKiŁ |
| O książce |
| Podręcznik z zakresu techniki cyfrowej, poświęcony budowie i programowaniu mikrokontrolerów Nitron, będących jednymi z najnowszych i jednocześnie najmniejszych 8-bitowych układów firmy Motorola (a obecnie Freescale Semiconductor). W przystępny sposób opisano zarówno samą jednostkę centralną CPU08, jak i poszczególne układy peryferyjne mikrokontrolerów Nitron. Szczególną uwagę zwrócono na wyjaśnienie związków przyczynowo-skutkowych, występujących między sposobem konfigurowania poszczególnych modułów i przykładowymi sytuacjami, mogącymi wystąpić podczas pracy układu. Omówione zagadnienia zilustrowano przykładami wielu praktycznych urządzeń. Przedstawione programy lub ich fragmenty mogą ułatwić Czytelnikowi rozwiązywanie wielu problemów, napotkanych w trakcie przygotowywania własnych konstrukcji. Odbiorcy: studenci wyższych uczelni technicznych o specjalności: informatyka, elektronika i telekomunikacja, a także elektronicy hobbyści oraz inżynierowie poszukujący nowoczesnych podzespołów elektronicznych do realizowanych przez siebie projektów. Spis treści WPROWADZENIE 8 1. MIKROKONTROLER - MIKROKOMPUTER JEDNOUKŁADOWY 15 1.1. Architektura mikrokontrolera 16 1.2. Przygotowanie programu dla mikrokontrolera 25 1.3. Proces wykonywania programu 32 1.4. Polecenia skoków i rozgałęzień 36 1.5. Wywoływanie podprogramów i stos 41 1.6. Przerwania 47 2. OGÓLNA CHARAKTERYSTYKA MIKROKONTROLERÓW SERII NITRON 54 3. JEDNOSTKA CENTRALNA - CPUO8 63 3.1. Struktura jednostki centralnej 64 3.2. Rejestry jednostki centralnej 66 3.2.1. Akumulator - A 67 3.2.2. Rejestr indeksowy - H:X 67 3.2.3. Wskaźnik stosu - SP 68 3.2.4. Licznik programu - PC 70 3.2.5. Rejestr stanu - CCR 71 3.3. Tryby adresowania 74 3.3.1. Adresowanie wewnętrzne 74 3.3.2. Adresowanie natychmiastowe 75 3.3.3. Adresowanie bezpośrednie 76 3.3.4. Adresowanie względne 80 3.3.5. Adresowanie indeksowe 81 3.3.6. Adresowanie wskaźnikiem stosu 88 3.3.7. Adresowanie pamięć-pamięć 94 3.4. Lista rozkazów CPU08 99 3.4.1. Rozkazy przesłań 100 3.4.2. Rozkazy arytmetyczne 104 3.4.3. Rozkazy logiczne 107 3.4.4. Rozkazy przesuwania bitów 108 3.4.5. Rozkazy porównań i testów 110 3.4.6. Rozkazy operujące na bitach 113 3.4.7. Rozkazy skoków 114 3.4.8. Rozkazy sterujące 118 3.5. Taktowanie jednostki centralnej 123 3.6. Reakcja CPU08 na sygnały zerowania i zgłaszania przerwań 128 3.6.1. Sygnał zerowania 128 3.6.2. Sygnał przerwania 129 3.7. Mapa pamięci mikrokontrolerów serii Nitron 136 4. PORTY I UKŁADY PERYFERYJNE 144 4.1. Porty transmisji równoległej 146 4.1.1. Port PTA 146 4.1.2. Port PTB 153 4.1.3. Reguły programowania linii portów PTA i PTB 155 4.1.4. Przykład - komunikacja z wyświetlaczem LCD 162 4.2. Emulowanie portu transmisji szeregowej 168 4.2.1. Przykład - termometr cyfrowy z magistralą I2C 175 4.3. Moduł przerwania zewnętrznego - IRQ 186 4.3.1. Zasady prawidłowej obsługi modułu przerwania zewnętrznego 190 4.3.2. Przykład - zegar cyfrowy 192 4.4. Moduł klawiatury - KBI 201 4.4.1. Programowanie i obsługa modułu klawiatury 204 4.4.2. Przykład - zamek szyfrowy z klawiaturą matrycową 210 4.5. Przetwornik analogowo-cyfrowy - ADC 218 4.5.1. Zasady prawidłowego używania modułu ADC 227 4.5.2. Przykład - woltomierz z linijką analogową 229 4.6. Układ czasowy - TIM 234 4.6.1. Blok podstawy czasu 235 4.6.2. Kanały modułu TIM 246 4.6.3. Tryb rejestrowania zdarzeń - IC 247 4.6.4. Tryb komparatora czasu - OC 250 4.6.5. Tryb generatora sygnału PWM 254 4.6.6. Tryb buforowany 260 4.6.7. Reguły poprawnego konfigurowania i obsługiwania modułu TIM 264 4.6.8. Przykład - regulator prędkości obrotowej wentylatora 268 5. KONFIGUROWANIE I TRYBY PRACY MIKROKONTROLERA 272 5.1. Zestaw rejestrów konfiguracyjnych - CONFIG 274 5.2. Moduł generatora podstawy czasu - OSC 277 5.2.1. Oscylator wewnętrzny 281 5.2.2. Obwód rezonansowy RC 283 5.2.3. Rezonator kwarcowy lub ceramiczny 284 5.2.4. Zewnętrzny generator fali prostokątnej 285 5.3. System zerowania mikrokontrolera - Reset 286 5.3.1. Zerowanie po włączeniu napięcia zasilającego – POR 288 5.3.2. Zewnętrzny sygnał zerujący - RST 290 5.3.3. Układ licznika-nadzorcy - COP 293 5.3.4. Zerowanie w wyniku pobrania błędnego kodu rozkazu – ILOP 298 5.3.5. Próba pobrania rozkazu z niedozwolonego miejsca - ILAD 299 5.3.6. Układ wykrywający niski poziom napięcia zasilającego - LVI 301 5.4. Tryby niskiego poboru mocy 307 5.4.1. Tryb oczekiwania - Wait 311 5.4.2. Tryb zatrzymania-Stop 312 5.4.3. Układ automatycznego budzenia - AWU 314 5.5. Wprowadzanie mikrokontrolera w tryb monitora - MON08 317 5.5.1. Uruchamianie trybu monitora w stanie zaprogramowanym 321 5.5.2. Uruchamianie trybu monitora w stanie niezaprogramowanym 327 D. DODATEK 331 D. 1. Mapa pamięci mikrokontrolerów serii Nitron 333 D.2. Zestawienie rejestrów mikrokontrolera 333 D.2.1. Rejestry jednostki centralnej 333 D.2.2. Rejestry układów peryferyjnych 334 D.2.3. Rejestry konfiguracyjne 338 D.2.4. Rejestry przechowywane w pamięci Flash 339 D.3. Tablica wektorów mikrokontrolerów serii Nitron 40 D.4. Lista rozkazów jednostki centralnej CPU08 341 D.5. Zestawienie trybów adresowania 353 D.6. Zestawienie obudów mikrokontrolerów serii Nitron 357 D.7. Biblioteka procedur obsługi wyświetlacza LCD - LCD_HC08 357 D. 7 .1. Plik LCD_ HC08.inc 359 D.8. Biblioteka procedur emulujących port I2C - I2C_HC08 361 D.8.1. Plik I2C_HC08.inc 363 D.9. Schematy wykorzystywane w przykładach 366 D.9.1. Urządzenia z wyświetlaczem 7-segmentowym 367 D.9.2. Urządzenia z wyświetlaczem LCD 367 D.9.3. Urządzenia z interfejsem RS 232 369 D.9.4. Urządzenia z klawiaturą matrycową 369 LITERATURA 371 |
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
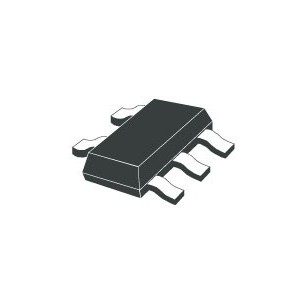
Coreless Transformer Isolated Digital Output 8 Channel 0.625A High-Side Switch, Infineon, RoHS
Brak towaru
Moduł XBee (ZigBee) o mocy wyjściowej 0 dBm/1 mW, prędkość do 250 kb/s, wyposażony w antenę prętową.
Brak towaru
Moduł XBee (ZigBee) o mocy wyjściowej 0 dBm/1 mW, prędkość do 250 kb/s, wyposażony w złącze antenowe U.FL.
Brak towaru
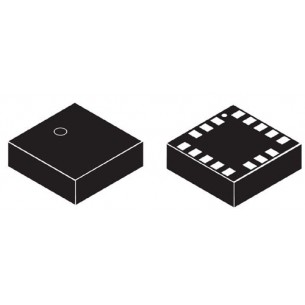
LPS331AP to precyzyjny czujnik ciśnienia MEMS z cyfrowym interfejsem I2C/SPI, zaprojektowany do pomiarów atmosferycznych w kompaktowych urządzeniach elektronicznych. Idealny do aplikacji mobilnych, lokalizacji GPS oraz systemów pomiaru wysokości i ciśnienia.
Brak towaru
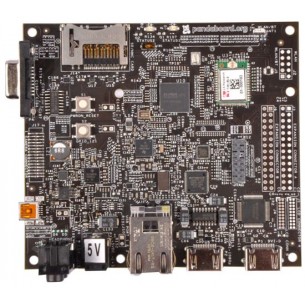
CoolRunner-II płyta startowa CPLD z XC2C256-TQ144. Digilent 410-146
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Dariusz Kościelnik