





















600,94 zł Netto
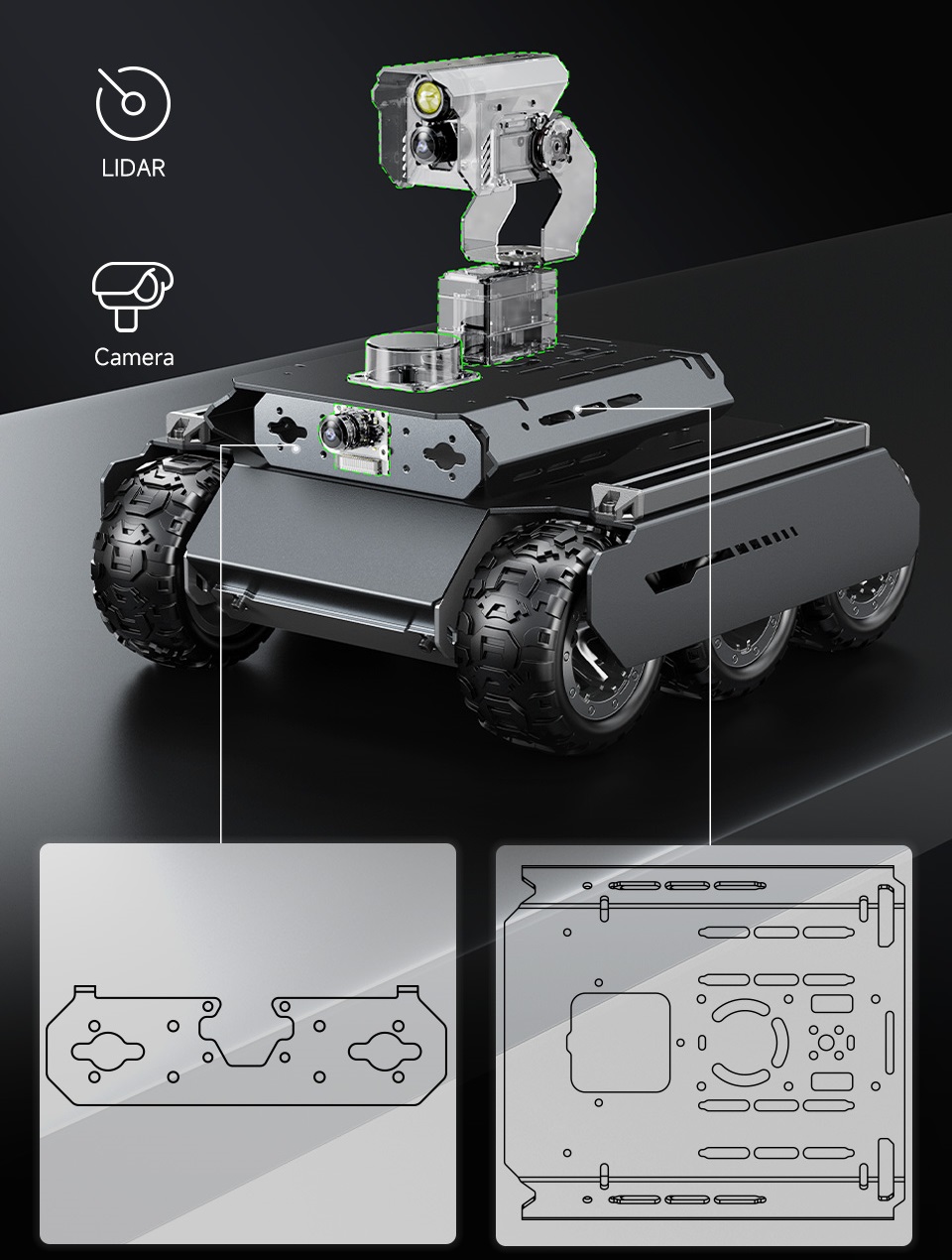
Sześciokołowe mobilne podwozie robota przeznaczone do projektów wymagających jazdy po wymagającym terenie. Wykorzystuje sterownik oparty o ESP32 oraz zestaw czujników IMU. Może być łatwo rozbudowany o dodatkowe elementy np. ramię robotyczne, kamerę lub LIDAR. Waveshare UGV02 (EU)
UGV02 to mobilne podwozie robota z 6 kołami (w tym 4 napędzane przez silniki DC), które charakteryzuje się doskonałą zdolnością do pokonywania przeszkód terenowych. Sześciokołowa konstrukcja zwiększa powierzchnię kontaktu z podłożem i ładowność. Podwozie wykorzystuje elastyczne gumowe opony, które znacznie zmniejszają wpływ złożonego terenu i mogą z łatwością sprostać potrzebom wynikającym z jazdy w terenie. Jest również wyposażony w szyny wykonane z aluminiowych profili, co zapewnia więcej możliwości rozwoju projektu.
Wbudowany moduł sterowania robota (oparty na ESP32 komunikacją z WiFi i Bluetooth) zapewnia kontrolę serwomechanizmów za pomocą magistrali szeregowej, sygnału PWM oraz możliwość rozszerzania funkcjonalności o gniazdo karty microSD. Wyposażony jest wyświetlacz OLED o przekątnej 0,91" oraz 9-osiowy czujnik IMU.
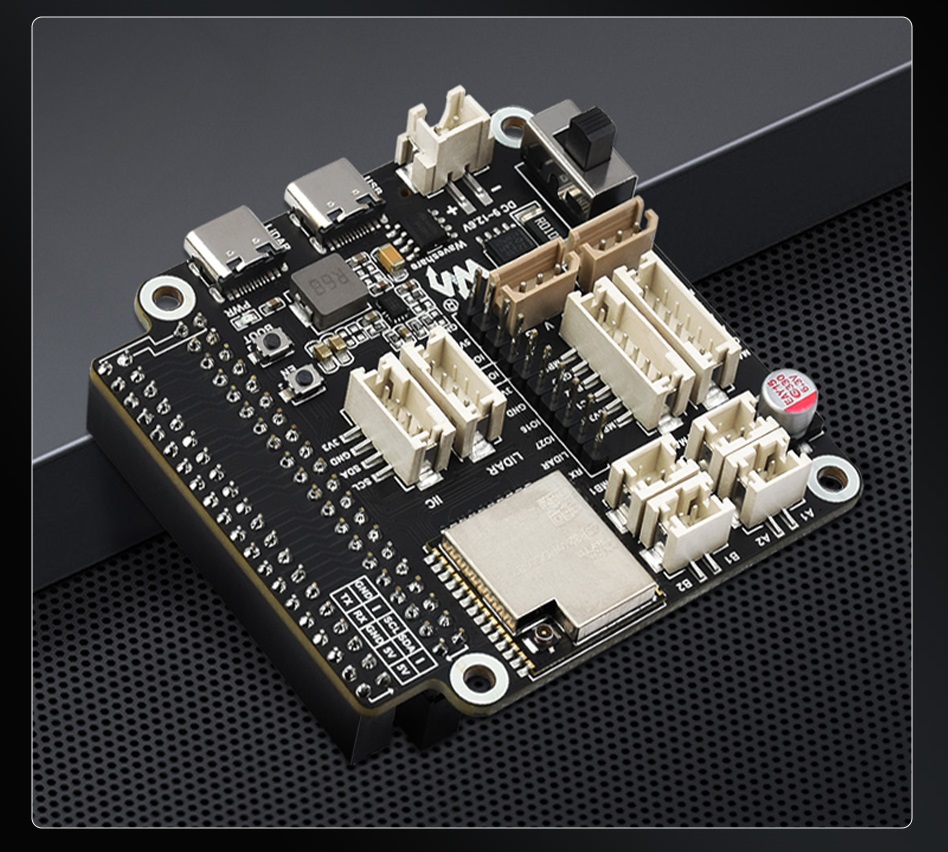
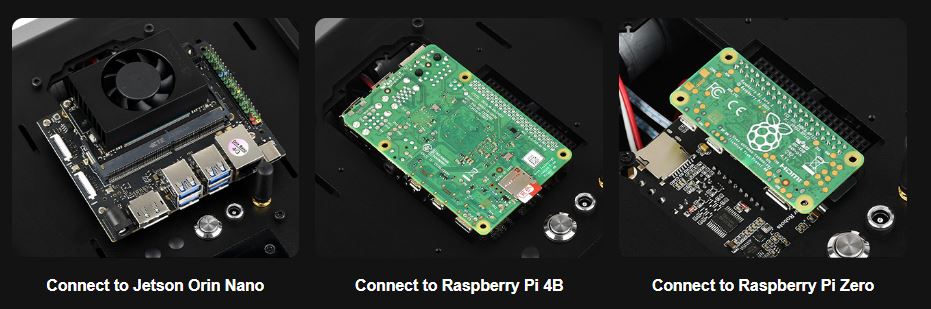
Robot wspiera obsługę wielu komputerów hosta (Raspberry Pi, Jetson Nano, Jetson Orin Nano itp.), które mogą komunikować się z komputerem podrzędnym ESP32 przez port szeregowy.
Moduł zasilania UPS 3S obsługuje 3 akumulatory Li-Ion 18650 i zapewnia stabilne zasilanie robota. Producent udostępnia kod open source, co umożliwia łatwy rozwój projektu. Pełna dokumentacja wraz z licznymi przykładami dostępna jest na stronie produktu.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Długo oczekiwany komputer Raspberry Pi 4 model B z czterordzeniowym układem SoC Broadcom BCM2711 (4 x Cortex-A72) pracującym z taktowaniem 1,8GHz, pamięcią RAM LPDDR4 o pojemności 4 GB i układem graficznym Broadcom VideoCore VI
Brak towaru
Zestaw deweloperski NVIDIA z układem CPU ARM Cortex A57 1,43GHz oraz układem graficznym Maxwell składającym się z 128 rdzeni wspierającym technologię CUDA. Moduł ma pamięć RAM DDR4 4GB, 16 GB eMMC oraz dołączoną pamięć zewnętrzną USB 32 GB i kartę microSD 64 GB. Waveshare JETSON-NANO-DEV-KIT
Zestaw do budowy robota robaka. Podwozie wyposażone zostało w cztery silniki i sterownik, 2 diody RGB oraz mikrokontroler STM32F030. M5Stack K033
Zestaw do budowy podwozia 4WD w kształcie samochodu. Może służyć jako baza do budowy robota
Brak towaru
Cobra Flex to kompaktowe i zaawansowane podwozie 4WD typu drive-by-wire z niezależnym zawieszeniem i silnikami w piaście. Przeznaczone do budowy robotów mobilnych i autonomicznych platform badawczych z otwartym kodem i wieloma interfejsami komunikacyjnymi. Umożliwia integrację z Raspberry Pi, Jetson Orin i innymi systemami wbudowanymi.
Brak towaru
Zestaw do budowy podwozia 4WD w kształcie samochodu. Może służyć jako baza do budowy robota
Aluminiowe podwozie 2WD z kółkiem podporowym. Może służyć jako baza do budowy niewielkiego robota mobilnego
Mobilne podwozie robota z napędem na 4 koła, wykonane w całości z metalu, charakteryzujące się doskonałą zdolnością do pokonywania przeszkód w terenie, a także otwartym kodem źródłowym do wtórnego rozwoju. Waveshare 25377
Aluminiowe podwozie 2WD z kółkiem podporowym. Może służyć jako baza do budowy niewielkiego robota mobilnego
Aluminiowe podwozie 2WD z kółkiem podporowym. Może służyć jako baza do budowy niewielkiego robota mobilnego
Aluminiowa platforma do budowy robota mobilnego. W płycie wykonano liczne otwory ułatwiające montaż silników i elektroniki
Aluminiowa platforma do budowy robota mobilnego. W płycie wykonano liczne otwory ułatwiające montaż silników i elektroniki
Aluminiowa platforma o średnicy 140 mm to solidna i uniwersalna podstawa do budowy robotów mobilnych. Liczne otwory ułatwiają integrację komponentów, a odporność mechaniczna zapewnia trwałość w warunkach warsztatowych i terenowych.
Okrągła aluminiowa platforma z dodatkowymi wycięciami to uniwersalna baza do budowy robotów mobilnych. Ułatwia montaż elementów i prowadzenie instalacji, zapewniając jednocześnie trwałość i elastyczność konstrukcyjną.
Podwozie robota mobilnego wyposażone w napęd na cztery koła. Modułowa budowa pozwala na łatwy rozwój projektu. Idealne do budowy pierwszego robota mobilnego. Waveshare Robot-Chassis-NS
Brak towaru
Zestaw do budowy podwozia 2WD z kółkiem podporowym. Może służyć jako baza do budowy niewielkiego robota mobilnego.
Podwozie robota 2WD wykonane z pleksi z kompletem elementów montażowych (śruby, tulejki, nakrętki). W zestawie są silniki, koła 65 mm, kółka podporowe oraz koszyk na baterie
Sześciokołowe mobilne podwozie robota przeznaczone do projektów wymagających jazdy po wymagającym terenie. Wykorzystuje sterownik oparty o ESP32 oraz zestaw czujników IMU. Może być łatwo rozbudowany o dodatkowe elementy np. ramię robotyczne, kamerę lub LIDAR. Waveshare UGV02 (EU)

















