






















1 306,80 zł Netto
Ramię robotyczne 5 DoF zbudowane na bazie serwomechanizmów i ESP32. Może być sterowane bezprzewodowo przez WiFi i przeglądarkę internetową lub interfejs USB. Waveshare RoArm-M1 (EU)

darmowa wysyłka na terenie Polski dla wszystkich zamówień powyżej 500 PLN

Jeśli Twoja wpłata zostanie zaksięgowana na naszym koncie do godz. 11:00

Każdy konsument może zwrócić zakupiony towar w ciągu 14 dni bez zbędnych pytań
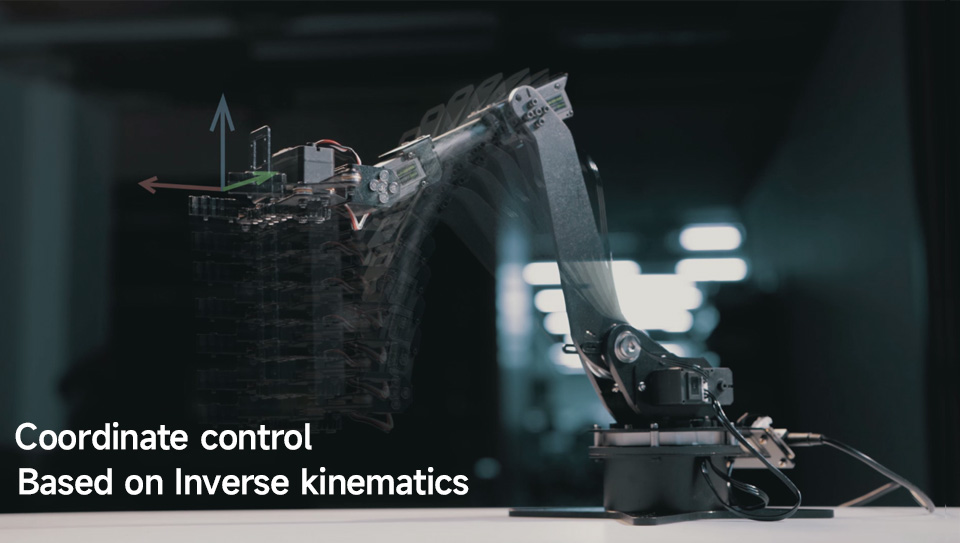
Ramię robotyczne (manipulator) o 5 stopniach swobody (5 DoF). Zbudowany został w oparciu o serwomechanizmy sterowane przez interfejs szeregowy UART oraz moduł ESP32-WROOM-32, który zapewnia komunikację WiFi i Bluetooth. Sterowany jest bezprzewodowo przy pomocy przeglądarki internetowej.
Wykorzystanie czterech przegubów o szerokim zakresie obrotu oraz zaimplementowane algorytmy kinematyki odwrotnej i płynnej regulacji prędkości zapewniają bardzo płynny ruch z łagodnym startem i zatrzymaniem. Manipulator może poruszać się w trybie regulacji kata obrotu lub trybie sterowania współrzędnymi XYZ chwytaka. Obsługuje tryb "podążania" oparty na ESP-NOW oraz tryb nagrywania i odtwarzania ruchu.
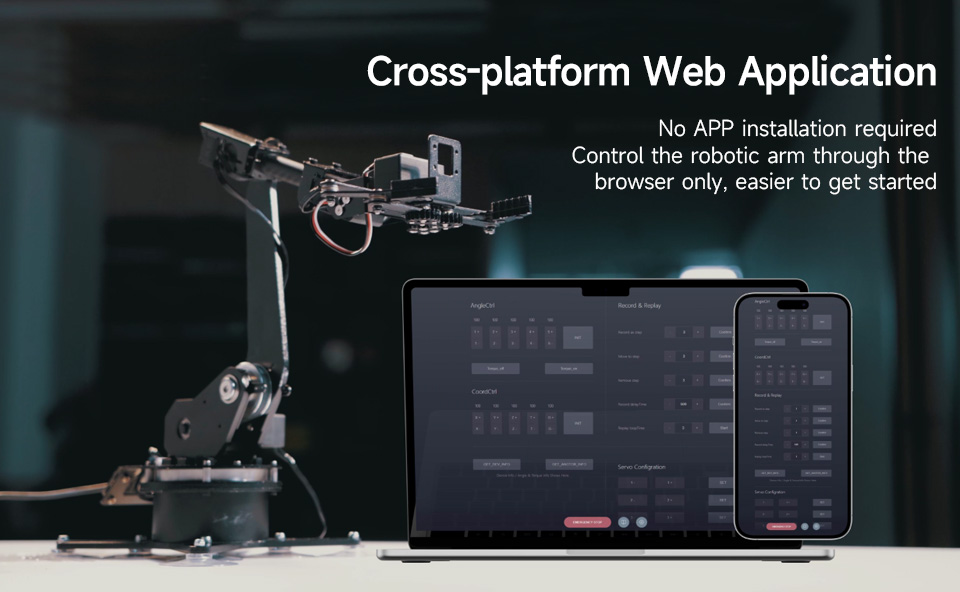
Do sterowania manipulatorem producent dostarcza dedykowaną aplikację dostępną na różnego typu platformy, w tym komputery PC, tablety czy smartfony. Nie wymaga ona instalacji i jest uruchamiana w przeglądarce internetowej, dzięki czemu można w łatwy i szybki sposób rozpocząć zabawę.
Sterownik oparty został o moduł ESP32-WROOM-32 wyposażony w komunikację WiFi 2,4 GHz oraz Bluetooth 4.2. Odpowiada on za sterowanie serwomechanizmami oraz realizację wbudowanych algorytmów. Może być podłączony przez USB do komputera PC, Raspberry Pi czy Jetson Nano.
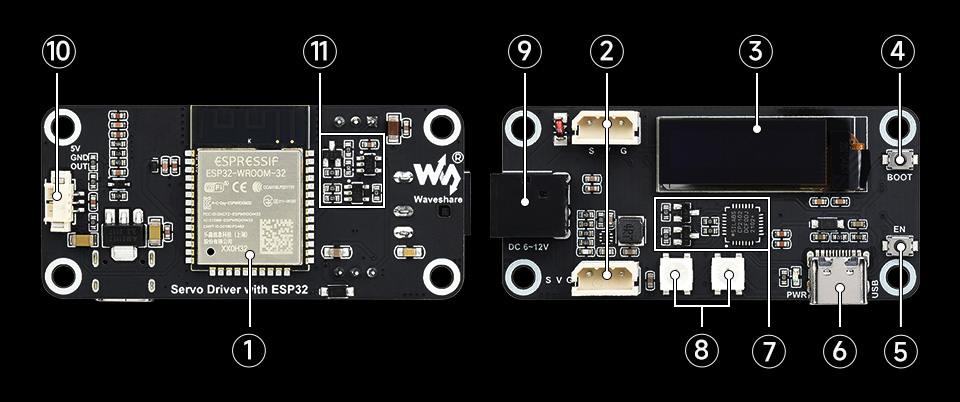
| 1. ESP32-WROOM-32 | 7. Konwerter USB-UART |
| 2. Złącze do serwomechanizmów | 8. RGB LED |
| 3. OLED | 9. Złącze zasilania DC |
| 4. Przycisk Download | 10. Złącze rozszerzeń RGB LED |
| 5. Przycisk Reset | 11. Obwód sterowania serwami |
| 6. Złącze USB typu C |
Konstrukcja manipulatora wykonana została z aluminium (korpus) oraz włókna węglowego. Do wykonania chwytaka wykorzystano stal nierdzewną . Wysoka jakość materiałów oraz wykonania zapewnia stabilność, wytrzymałość i trwałość konstrukcji.
Producent oferuje bogate wsparcie w postaci poradników dla ROS2 oraz innych materiałów edukacyjnych. Pełna dokumentacja dostępna jest na stronie produktu.
Zestaw deweloperski NVIDIA układem CPU ARM Cortex A57 1,43GHz oraz układem graficznym Maxwell składającym się z 128 rdzeni wspierającym technologię CUDA. Moduł posiada pamięć RAM DDR4 4GB. NVIDIA Jetson Nano Development Kit rev. B01 945-13450-0000-100
Brak towaru
Najnowsza wersja komputera z serii Raspberry Pi: Raspberry Pi 4 model B z czterordzeniowym SoC (Broadcom BCM2711, Cortex-A72) pracującym z częstotliwością 1,5GHz, 2GB pamięci RAM LPDDR4, układ graficzny Broadcom VideoCore VI.
Długo oczekiwany komputer Raspberry Pi 4 model B z czterordzeniowym układem SoC Broadcom BCM2711 (4 x Cortex-A72) pracującym z taktowaniem 1,5GHz, pamięcią RAM LPDDR4 o pojemności 4 GB i układem graficznym Broadcom VideoCore VI
Zestaw do samodzielnego montażu ramienia robotycznego o czterech stopniach swobody (4DOF) wyposażone w serwomechnizmy MG90S. Ramię na końcu posiada niewielki chwytak co pozwala na łapanie oraz przenoszenie niewielkich przedmiotów.Ramię sterowanie za pomocą płytki zgodnej z Arduino Uno lub modułu z potencjometrami.
Ramię robotyczne o czterech stopniach swobody (4 DoF) zbudowane na bazie serwomechanizmów i sterownika z modułem ESP32. Może być sterowane bezprzewodowo przez WiFi i przeglądarkę internetową lub interfejs USB. Waveshare RoArm-M2-S (EU)
Bioniczna dłoń sterowana za pomocą serwomechanizmów. Wykonana jest z materiału akrylowego, pozwala na sterowanie każdym palcem z osobna. DFRobot ROB0143
Brak towaru
Chwytak robotyczny zbudowany na bazie serwa SG92R. Ma kąt otwierania i zamykania 90° i otwory montażowe kompatybilne z Lego. M5Stack U102
Niewielkich rozmiarów chwytak napędzany serwomechanizmem o zakresie ruchu wynoszącym 32 mm. Zawiera specjalne mikro serwo z dodatkowym przewodem, który daje dostęp do jego sprzężenia zwrotnego, dzięki czemu można śledzić rzeczywistą pozycję łopatek chwytaka. Pololu 3551
Brak towaru
Zestaw ramienia robota to dodatek do platformy Romi Chassis, umożliwiający manipulowanie małymi obiektami. Zestaw zawiera mikro-chwytak, ramiona podtrzymujące chwytak i platformę do montażu. Pololu 3550
Brak towaru
Zestaw do montażu ramienia robotycznego o czterech stopniach swobody (4DOF). Manipulator oparty został na serwomechanizmach i jest sterowany bezprzewodowo za pomocą Raspberry Pi. Waveshare Robot Arm for Pi (for Europe)
Bioniczna dłoń sterowana za pomocą serwomechanizmów. Wykonana jest z materiału akrylowego, pozwala na sterowanie każdym palcem z osobna. DFRobot ROB0142
Brak towaru
Ramię robotyczne 5 DoF zbudowane na bazie serwomechanizmów i ESP32. Może być sterowane bezprzewodowo przez WiFi i przeglądarkę internetową lub interfejs USB. Waveshare RoArm-M1 (EU)










