354,33 zł Netto
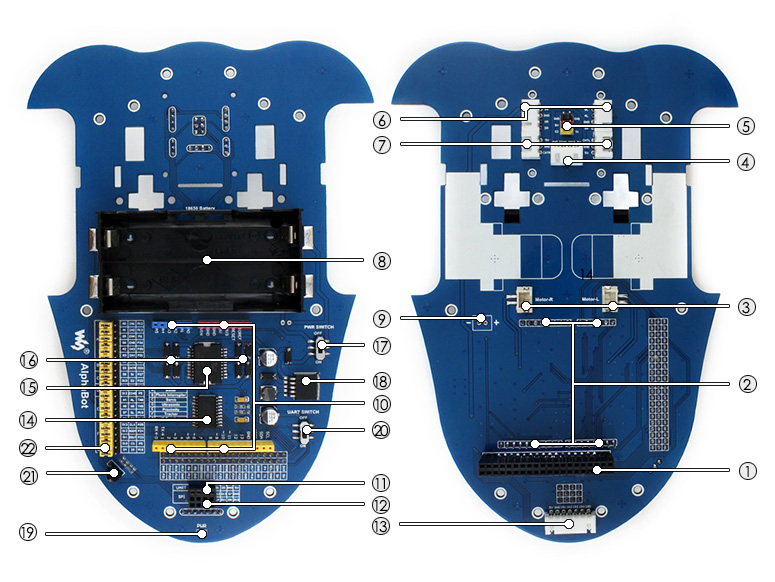
Zestaw do budowy robota opartego na Raspberry Pi. Zawiera podwozie, kamerę i zasilacz. Waveshare AlphaBot-Pi Acce Pack
Zestaw AlphaBot do budowy robota opartego na Raspberry Pi. Zestaw zawiera szereg modułów realizujących zadania takie jak śledzenie linii, omijanie przeszkód, pomiar prędkości, sterowanie poprzez podczerwień. Robot wykorzystuje rozwiązania modułowe, które umożliwiają łatwe i szybkie podłączanie elementów. W skład zestawu wchodzi podwozie z zestawem czujników oraz kamera z mocowaniem 2 DoF, dzięki czemu robot może posłużyć również jako element mobilnego monitoringu. Pełna dokumentacja dostępna jest na stronie produktu.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Najnowsza wersja komputera z serii Raspberry Pi: Raspberry Pi 4 model B z czterordzeniowym SoC (Broadcom BCM2711, Cortex-A72) pracującym z częstotliwością 1,8GHz, 1GB pamięci RAM LPDDR4, układ graficzny Broadcom VideoCore VI.
Brak towaru
Najnowsza wersja komputera z serii Raspberry Pi: Raspberry Pi 4 model B z czterordzeniowym SoC (Broadcom BCM2711, Cortex-A72) pracującym z częstotliwością 1,8GHz, 2GB pamięci RAM LPDDR4, układ graficzny Broadcom VideoCore VI.
Brak towaru
Długo oczekiwany komputer Raspberry Pi 4 model B z czterordzeniowym układem SoC Broadcom BCM2711 (4 x Cortex-A72) pracującym z taktowaniem 1,8GHz, pamięcią RAM LPDDR4 o pojemności 4 GB i układem graficznym Broadcom VideoCore VI
Długo oczekiwany komputer Raspberry Pi 4 model B z czterordzeniowym układem SoC Broadcom BCM2711 (4 x Cortex-A72) pracującym z taktowaniem 1,8GHz, pamięcią RAM LPDDR4 o pojemności 8 GB i układem graficznym Broadcom VideoCore VI
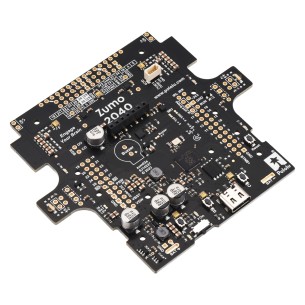
Kontroler przeznaczony do robota Pololu 3pi+ 2040. Został oparty o mikrokontroler Raspberry Pi RP2040 oraz wyposażony jest w zestaw czujników. Wersja do użytku z wyświetlaczem OLED. Pololu 5006
Brak towaru
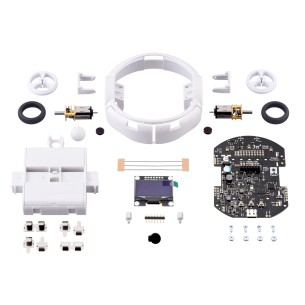
Zmodernizowana wersja popularnego robota mobilnego Pololu. Został oparty o mikrokontroler Raspberry Pi RP2040 i wyposażony jest w wyświetlacz OLED oraz zestaw czujników. Wersja do montażu. Pololu 5005
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu. Został oparty o mikrokontroler Raspberry Pi RP2040 i wyposażony jest w wyświetlacz OLED oraz zestaw czujników. Wersja do montażu. Pololu 5004
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu. Został oparty o mikrokontroler Raspberry Pi RP2040 i wyposażony jest w wyświetlacz OLED oraz zestaw czujników. Wersja do montażu. Pololu 5003
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu. Został oparty o mikrokontroler Raspberry Pi RP2040 i wyposażony jest w wyświetlacz OLED oraz zestaw czujników. Wersja zmontowana. Pololu 5002
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu. Został oparty o mikrokontroler Raspberry Pi RP2040 i wyposażony jest w wyświetlacz OLED oraz zestaw czujników. Wersja zmontowana. Pololu 5001
Zmodernizowana wersja popularnego robota mobilnego Pololu. Został oparty o mikrokontroler Raspberry Pi RP2040 i wyposażony jest w wyświetlacz OLED oraz zestaw czujników. Wersja zmontowana. Pololu 5000
Brak towaru
Rozbudowana płytka rozwojowa zaprojektowana specjalnie z myślą o projektach robotycznych. Zestaw wykorzystuje mikrokontroler ESP32-S3, który jest wyposażony w kamerę umożliwiającą transmisję wideo oraz zdalne sterowanie za pomocą WiFi i Bluetooth. DFRobot DFR0994
Ramię robotyczne o czterech stopniach swobody (4 DoF) zbudowane na bazie serwomechanizmów i sterownika z modułem ESP32. Może być sterowane bezprzewodowo przez WiFi i przeglądarkę internetową lub interfejs USB. Waveshare RoArm-M2-S (EU)
Brak towaru
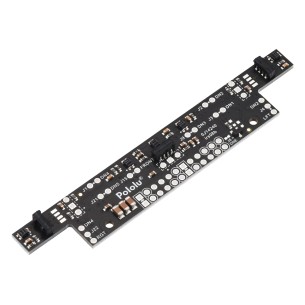
Przedni moduł czujników robota Zumo 2040. Jest dołączony jako część zestawu robotów Zumo i wbudowany w zmontowane wersje robotów. W zestawie znajdują się dodatkowe złącza i diody IR. Pololu 5015
Brak towaru
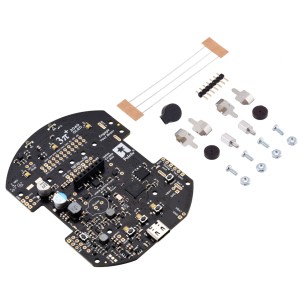
Główna płyta sterująca robota Zumo 2040. Jest dołączona jako część zestawu robotów Zumo 2040 i wbudowana w zmontowane wersje robotów Zumo 2040. Dołączone są elementy przewlekane, dyski do enkoderów magnetycznych i elementy montażowe. Pololu 5014
Brak towaru
Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 100:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 5013
Brak towaru
Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 75:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 5012
Brak towaru
Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 50:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 5011
Brak towaru
Zestaw akcesoriów do budowy autonomicznego robota wyścigowego w oparciu NVIDIA Jetson Nano. Waveshare JetRacer ROS AI Kit Acce (EU)
Brak towaru
Zestaw do budowy inteligentnego robota JetBot na bazie Jetson Nano. Składa się z modułu rozszerzeń, kamery z czujnikiem obrazu czujnika LIDAR, silników, podstawy jezdnej i 9-osiowego IMU. Waveshare JetBot ROS AI Kit Acce (EU)
Zestaw do budowy robota opartego na Raspberry Pi. Zawiera podwozie, kamerę i zasilacz. Waveshare AlphaBot-Pi Acce Pack