











131,10 zł Netto
Serwo analogowe typu standard wyposażone w plastikową przekładnię. Przystosowane do pracy ciągłej 360°. Pololu 3448
Serwo analogowe typu standard wyposażone w plastikową przekładnię. Ma ma zakres ruchu 360°, a do sterowania wykorzystywany jest standardowy sygnał modelarski PWM. Domyślny punkt spoczynku to 1,5 ms, ale można go wyregulować za pomocą pozycjonera. Serwomechanizm wyposażony został w dwa łożyska kulkowe na wale wyjściowym w celu zmniejszenia tarcia. Zalecane napięcie pracy wynosi 6 V i przy takim napięciu serwomechanizm ma szybkość 54 RPM i moment obrotowy 5,1 kg*cm. Przewód ma długość około 27 cm oraz jest zakończony standardowym złączem 3-pinowym JR.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
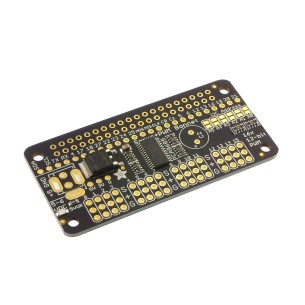
Moduł HAT ze sterownikiem serw PCA9685 przeznaczony do minikomputerów Raspberry Pi. Płytka wyposażona została w złącze 40-pinowe. Adafruit 3416
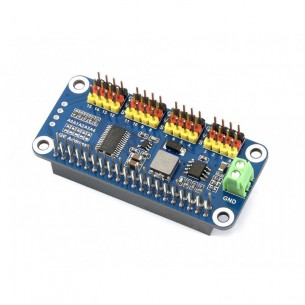
Moduł sterownika serwomechanizmów to rozszerzenie przeznaczone dla minikomputerów Raspberry Pi Zero/Zero W/Zero WH/2B/3B/3B+. Pozwala na sterowanie 16 kanałami PWM. Waveshare 15275
Brak towaru
Moduł z 8-kanałowym sterownikiem serwomechanizmów. Pozwala na kontrolowanie prędkości ruchu oraz początkowej pozycji serwa. Cytron SC08A
Serwomechanizm SM-S4303R Pololu 1248 do pracy w trybie ciągłego obrotu zapewnia prostą implementację napędu w projektach robotycznych. Oferuje duży moment obrotowy i pełną kompatybilność z akcesoriami RC oraz kontrolerami serw. Idealny do budowy mobilnych platform i autonomicznych pojazdów.
Nieduży serwomechanizm przystosowany do pracy w trybie ciągłym. Pololu 2820
Serwo Tower Pro SG90 (micro) 360 stopni o wielkości 23,0 x 12,2 x 29,0 mm, waga 9 g, zasilanie 4..6 V, moment 1,6 kg/cm przy napięciu 4,8 V
Brak towaru
Niewielki cyfrowy serwomechanizm przystosowany do pracy w trybie ciągłym. Zalecane napięcie pracy wynosi 6 V i przy takim napięciu serwomechanizm ma szybkość 170 obrotów/minutę i moment obrotowy 1,5 kg*cm (0,148 N-m). W zestawie z serwomechanizmem znajdują się różnego rodzaju obojczyki. Masa tego serwomechanizmu to jedynie 9 g. Pololu 2817
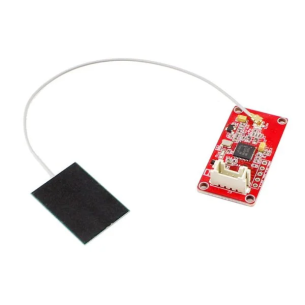
The Parallax Feedback 360° to cyfrowy serwomechanizm przystosowany do pracy w trybie ciągłym. Do sterowania jest wykorzystywany standardowy PWM modelarski. Zalecane napięcie pracy wynosi 6 V, przy takim napięciu serwomechanizm ma prędkość 140 obrotów/minutę i moment obrotowy 2,5 kg*cm (0,25 N-m). Dodatkowo serwomechanizm posiada czujnik Halla. Pololu 3432
Feetech FS5106R to serwomechanizm przystosowany do pracy w trybie ciągłym. Zalecane napięcie pracy wynosi 6 V, przy takim napięciu serwomechanizm osiąga prędkość 95 obrotów/minutę i moment obrotowy 6 kg*cm (0,59 N-m). W zestawie z serwomechanizmem znajdują się różnego rodzaju obojczyki oraz elementy montażowe. Masa serwomechanizmu to 39 g. Pololu 3430
Brak towaru
Serwo cyfrowe typu standard wyposażone w metalową przekładnię. Charakteryzuje się dużym momentem obrotowym i dużą wytrzymałością. Przystosowane do pracy ciągłej 360°. DS3225
Brak towaru
Serwo analogowe typu standard wyposażone w plastikową przekładnię. Przystosowane do pracy ciągłej 360°. Pololu 3448
Brak towaru
Programowalne serwo typu standard 17kg*cm sterowane przez interfejs UART. Może pracować w trybie kontroli kąta obrotu lub w trybie pracy ciągłej. Waveshare SC15 Servo
Programowalne serwo typu standard 30 kg*cm sterowane przez interfejs UART. Może pracować w trybie kontroli kąta obrotu lub w trybie pracy ciągłej. Waveshare ST3215 Servo
Brak towaru
Cyfrowy serwomechanizm magistrali UART z enkoderem magnetycznym 360°, momentem 19.5kg.cm przy 7.4V oraz dwukierunkowym sprzężeniem zwrotnym, obsługujący tryb serwa i silnika. Waveshare ST3215-7.4V Servo
Brak towaru
Inteligentne serwo magistralowe TTL marki Feetech z metalową przekładnią 1:345, obsługą obrotu 360°, enkoderem magnetycznym 12-bit oraz momentem zatrzymania 30kg.cm do robotyki i automatyki. Seeed Studio 108090003
Serwo analogowe typu standard wyposażone w plastikową przekładnię. Przystosowane do pracy ciągłej 360°. Pololu 3448