







")
")

135,79 zł Netto
Mini Maestro 18 w wersji zlutowanej to precyzyjny kontroler serwomechanizmów i uniwersalny ekspander I/O dla projektów robotycznych, animatronicznych i interaktywnych. Dzięki możliwościom pracy autonomicznej, obsłudze wielu kanałów i elastycznym konfiguracjom wejść/wyjść znajduje zastosowanie w zaawansowanych instalacjach wymagających płynnej kontroli ruchu i reakcji na sygnały z otoczenia.
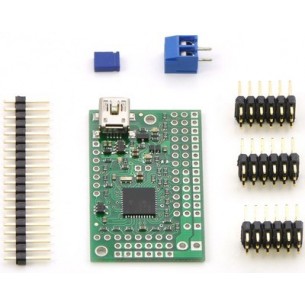
Mini Maestro 18 to rozbudowany kontroler serwomechanizmów z interfejsem USB, portem szeregowym TTL oraz możliwością pracy autonomicznej. Wersja zlutowana zawiera fabrycznie zamontowane złącza goldpin. Urządzenie oferuje 18 konfigurowalnych kanałów z wysoką precyzją generowania impulsów (rozdzielczość 0,25 µs, częstotliwość do 333 Hz) oraz indywidualną kontrolą prędkości i przyspieszenia dla każdego kanału. Kanały mogą pracować jako wyjścia PWM, wejścia analogowe, wejścia cyfrowe lub wyjścia cyfrowe. Zintegrowany interpreter skryptów oraz 8 KB pamięci umożliwia tworzenie autonomicznych sekwencji ruchów i reakcji na sygnały z czujników bez potrzeby użycia mikrokontrolera lub komputera.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Kabel z wtykami USB typ A oraz mini-USB typ B, kabel o długości 1,8 m
Brak towaru
Pololu Mini Maestro 1355 to kontroler serwomechanizmów z 18 konfigurowalnymi kanałami, przeznaczony do precyzyjnych aplikacji w robotyce, automatyce i animatronice. Wersja kit pozwala dostosować sposób montażu złączy do potrzeb projektu, a bogata funkcjonalność umożliwia tworzenie autonomicznych systemów sterowania oraz rozbudowę interfejsu wejść/wyjść w systemach embedded.
Brak towaru
Płytka rozszerzeniowa do minikomputera Raspberry Pi dodająca możliwość sterowania do 16 serw sygnałem PWM. Potrafi generować sygnał do 1,6 kHz z 12-bitową rozdzielczością. Dzięki sterowaniu za pomocą interfejsu I2C, do równoczesnego sterowania serw wystarczy użycie 2 pinów. Adafruit 2327
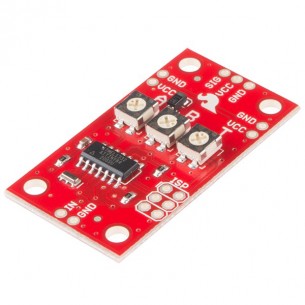
Moduł do sterowania serwem. Parametry pracy konfigurowane są za pomocą potencjometrów umieszczonych na płytce. SparkFun WIG-13118
Brak towaru
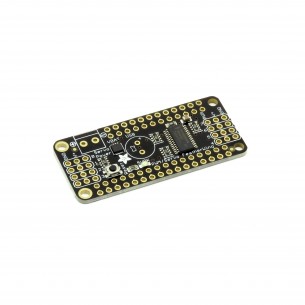
Ten moduł umożliwia rozszerzenie możliwości płytek serii Feather o 8 12-bitowych wyjść PWM, których można użyć np. do sterowania serwami lub diodami LED. Adafruit 2928
Płytka umożliwiająca sterowanie serwomechanizmem bez konieczności programowania. Sparkfun WIG-13872
Brak towaru
Sterownik serwomechanizmów do zestawów FPGA TerasIC serii DE umożliwia sterowanie maksymalnie 24 serwomechanizmami. Dostarcza napięcie 6 V do zasilania serwomechanizmów. W zestawie serwomechanizm MG966R i taśma do połączenia z zestawem FPGA. P0288
Sterownik serw w postaci shieldu Arduino. Pozwala sterować 7 serwami z serii Dynamixel AX. Komunikacja odbywa się za pomocą interfejsu SPI. DFRobot DRI0027
Brak towaru
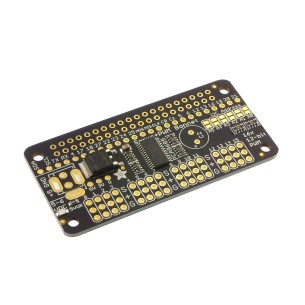
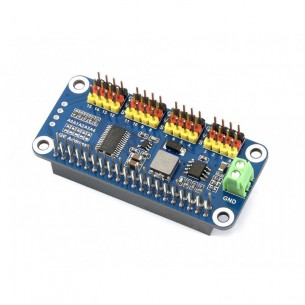
Moduł HAT ze sterownikiem serw PCA9685 przeznaczony do minikomputerów Raspberry Pi. Płytka wyposażona została w złącze 40-pinowe. Adafruit 3416
Moduł rozszerzeń przeznaczony do współpracy z micro:bit. Pozwala na sterownie 4 silnikami DC lub dwoma silnikami krokowymi i 8 serwami. Komunikuje się przez interfejs I2C. DFRobot DFR0548
Moduł rozszerzeń przeznaczony do współpracy z płytką edukacyjną micro:bit. Może sterować 3 serwomechanizmami i 2 silnikami prądu stałego. Waveshare Motor Driver for micro:bit
Brak towaru
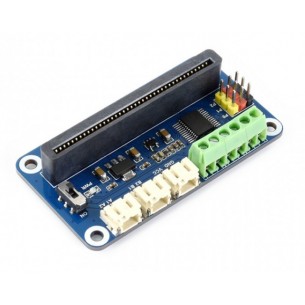
Moduł sterownika serwomechanizmów to rozszerzenie przeznaczone dla minikomputerów Raspberry Pi Zero/Zero W/Zero WH/2B/3B/3B+. Pozwala na sterowanie 16 kanałami PWM. Waveshare 15275
Brak towaru
Moduł z 8-kanałowym sterownikiem serwomechanizmów. Pozwala na kontrolowanie prędkości ruchu oraz początkowej pozycji serwa. Cytron SC08A
Moduł z 16-kanałowym sterownikiem serwomechanizmów PCA9685 przeznaczony dla minikomputerów Raspberry Pi. Płytka wyposażona jest w złącze zasilające USB Typ C. SparkFun DEV-15316
Uniwersalny tester serwomechanizmów oraz regulatorów ESC. Umożliwia sprawdzenie działania serwa bez potrzeby korzystania z nadajnika i odbiornika
Brak towaru
Uniwersalny tester serwomechanizmów oraz regulatorów ESC. Umożliwia sprawdzenie działania serwa bez potrzeby korzystania z nadajnika i odbiornika
Uniwersalny tester serwomechanizmów oraz regulatorów ESC. Umożliwia sprawdzenie działania serwa bez potrzeby korzystania z nadajnika i odbiornika
Moduł z 16-kanałowym sterownikiem PWM PCA9685. Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs I2C. Seeed Studio 108020102
Mini Maestro 18 w wersji zlutowanej to precyzyjny kontroler serwomechanizmów i uniwersalny ekspander I/O dla projektów robotycznych, animatronicznych i interaktywnych. Dzięki możliwościom pracy autonomicznej, obsłudze wielu kanałów i elastycznym konfiguracjom wejść/wyjść znajduje zastosowanie w zaawansowanych instalacjach wymagających płynnej kontroli ruchu i reakcji na sygnały z otoczenia.