")
")

50,08 zł Netto
Czterokanałowy multiplekser w wersji Partial Kit zapewnia niezawodne przełączanie czterech kanałów RC pomiędzy dwoma źródłami sygnału, oferując jednocześnie dużą elastyczność montażu. Moduł sprawdzi się w projektach robotycznych, modelarskich oraz systemach autonomicznych, gdzie wymagane jest dynamiczne przełączanie sterowania lub zwiększenie bezpieczeństwa i kontroli nad sygnałami RC. Pololu 2807
Kompaktowy, czterokanałowy multiplekser sygnałów RC przeznaczony do przełączania sterowania serwami lub regulatorami ESC pomiędzy dwoma niezależnymi źródłami sygnału. Moduł umożliwia wybór aktywnego źródła (MASTER lub SLAVE) za pomocą dodatkowego kanału sterującego SEL, analizując szerokość impulsu RC. Rozwiązanie znajduje zastosowanie m.in. w systemach szkoleniowych typu „buddy”, projektach z przełączaniem pomiędzy sterowaniem ręcznym i autonomicznym oraz w instalacjach wymagających redundancji sterowania.
Wersja Partial Kit dostarczana jest z elementami SMD już zamontowanymi, natomiast elementy przewlekane wymagają samodzielnego lutowania, co pozwala na elastyczne dopasowanie połączeń i bardziej kompaktowy montaż.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Sterownik serw w postaci shieldu Arduino. Pozwala sterować 7 serwami z serii Dynamixel AX. Komunikacja odbywa się za pomocą interfejsu SPI. DFRobot DRI0027
Brak towaru
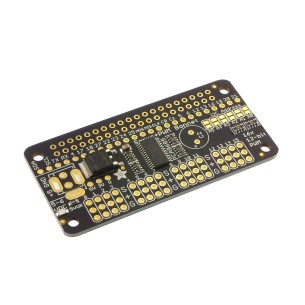
Moduł HAT ze sterownikiem serw PCA9685 przeznaczony do minikomputerów Raspberry Pi. Płytka wyposażona została w złącze 40-pinowe. Adafruit 3416
Brak towaru
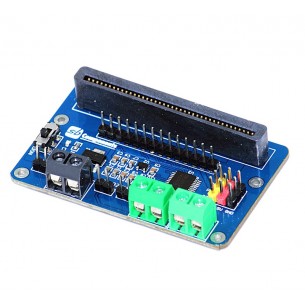
Moduł rozszerzeń przeznaczony do współpracy z micro:bit. Pozwala na sterownie 4 silnikami DC lub dwoma silnikami krokowymi i 8 serwami. Komunikuje się przez interfejs I2C. DFRobot DFR0548
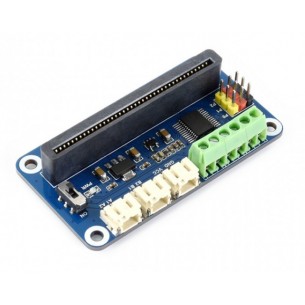
Moduł rozszerzeń przeznaczony do współpracy z płytką edukacyjną micro:bit. Może sterować 3 serwomechanizmami i 2 silnikami prądu stałego. Waveshare Motor Driver for micro:bit
Brak towaru
Moduł sterownika serwomechanizmów to rozszerzenie przeznaczone dla minikomputerów Raspberry Pi Zero/Zero W/Zero WH/2B/3B/3B+. Pozwala na sterowanie 16 kanałami PWM. Waveshare 15275
Brak towaru
Moduł z 8-kanałowym sterownikiem serwomechanizmów. Pozwala na kontrolowanie prędkości ruchu oraz początkowej pozycji serwa. Cytron SC08A
Moduł z 16-kanałowym sterownikiem serwomechanizmów PCA9685 przeznaczony dla minikomputerów Raspberry Pi. Płytka wyposażona jest w złącze zasilające USB Typ C. SparkFun DEV-15316
Uniwersalny tester serwomechanizmów oraz regulatorów ESC. Umożliwia sprawdzenie działania serwa bez potrzeby korzystania z nadajnika i odbiornika
Uniwersalny tester serwomechanizmów oraz regulatorów ESC. Umożliwia sprawdzenie działania serwa bez potrzeby korzystania z nadajnika i odbiornika
Uniwersalny tester serwomechanizmów oraz regulatorów ESC. Umożliwia sprawdzenie działania serwa bez potrzeby korzystania z nadajnika i odbiornika
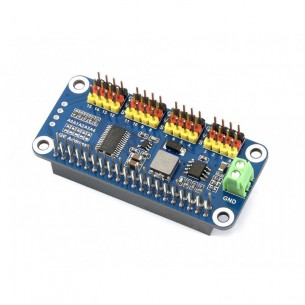
Moduł z 16-kanałowym sterownikiem PWM PCA9685. Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs I2C. Seeed Studio 108020102
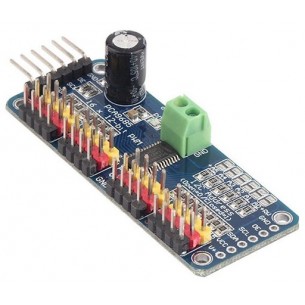
Moduł 16-kanałowego sterownika serw z interfejsem I2C oparty o układ PCA9685. modPCA9685
Brak towaru
Moduł z 2-kanałowym sterownikiem silników DC TB6612FNG przeznaczony do współpracy z micro:bit. Może sterować także 3 serwami. SB Components 14897
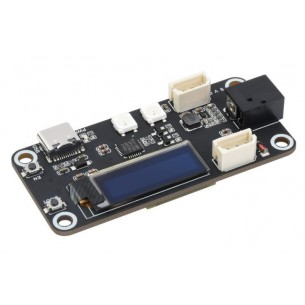
Sterownik serwomechanizmów z interfejsem szeregowym UART. Wyposażony w moduł ESP32 z komunikacją bezprzewodową WiFi i Bluetooth. Waveshare Servo Driver with ESP32
Sterownik serwomechanizmów oparty na mikrokontrolerze Raspberry Pi RP2040. Pozwala na sterowanie do 18 serw, ma 6 wejść analogowych oraz złącze QW/ST do podłączenia dodatkowych czujników. Pimoroni PIM613
Sterownik serwomechanizmów 8-kanałów z potencjometrami to wszechstronne urządzenie umożliwiające kontrolę wielu serwomechanizmów jednocześnie. Dzięki szerokiemu zakresowi napięcia jest idealnym rozwiązaniem dla projektów robotycznych i zdalnie sterowanych aplikacji
Czterokanałowy multiplekser w wersji Partial Kit zapewnia niezawodne przełączanie czterech kanałów RC pomiędzy dwoma źródłami sygnału, oferując jednocześnie dużą elastyczność montażu. Moduł sprawdzi się w projektach robotycznych, modelarskich oraz systemach autonomicznych, gdzie wymagane jest dynamiczne przełączanie sterowania lub zwiększenie bezpieczeństwa i kontroli nad sygnałami RC. Pololu 2807