")
")

53,02 zł Netto
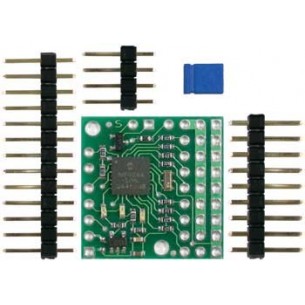
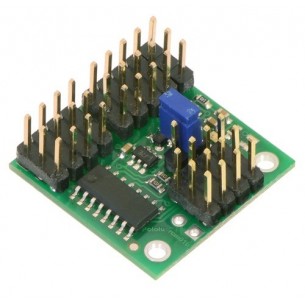
Multiplexer w wersji zmontowanej umożliwia szybkie i niezawodne przełączanie czterech kanałów RC pomiędzy dwoma źródłami sterowania bez potrzeby lutowania. Moduł sprawdzi się w systemach szkoleniowych typu „buddy”, projektach z przełączaniem sterowania ręcznego i autonomicznego oraz w aplikacjach wymagających bezpiecznego i elastycznego zarządzania sygnałami RC. Pololu 2806
Gotowy do użycia, czterokanałowy multiplekser sygnałów RC, przeznaczony do przełączania sterowania serwami lub regulatorami ESC pomiędzy dwoma niezależnymi źródłami sygnału. Wybór aktywnego źródła (MASTER lub SLAVE) odbywa się za pomocą dodatkowego kanału RC SEL, analizującego szerokość impulsu sterującego.
Wersja montowana fabrycznie została wyposażona w przylutowane piny goldpin 2,54 mm, dzięki czemu możliwa jest bezpośrednia integracja z typowymi systemami modelarskimi RC bez konieczności lutowania.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
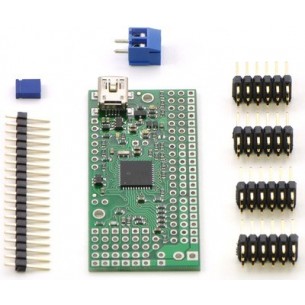
Mini Maestro 24 w wersji zlutowanej zapewnia pełną funkcjonalność sterowania 24 serwomechanizmami z możliwością rozbudowy o wejścia analogowe i cyfrowe. Idealny do złożonych aplikacji robotycznych, interaktywnych instalacji i projektów animatronicznych, w których wymagane jest precyzyjne i zautomatyzowane zarządzanie wieloma kanałami.
Brak towaru
Brak towaru
Micro Serial Servo kontroler Pololu to sprawdzony, bardzo mały i elastyczny kontroler serw RC. Świetnie nadaje się do projektów, gdzie liczy się rozmiar, prostota i możliwość rozbudowy poprzez łączenie wielu modułów w jeden system. Pololu 208
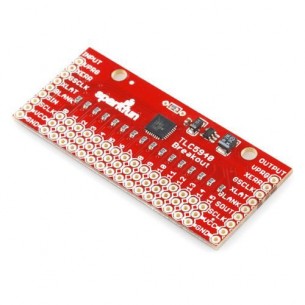
Moduł 16-kanałowego sterownika serw z interfejsem I2C oparty o układ PCA9685. Adafruit 815
Moduł z 16-kanałowym generatorem PWM umożliwiający np. kontrolę silników DC, obsługę serwomechanizmów lub sterowanie diodami LED. Magistrala SPI, rozdzielczość sygnału PWM 12 bitów.
BOB-10616
Brak towaru
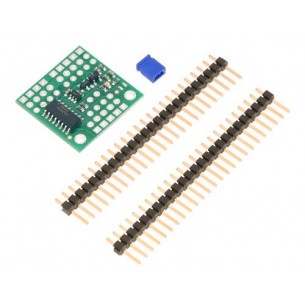
Czterokanałowy multiplekser w wersji Partial Kit zapewnia niezawodne przełączanie czterech kanałów RC pomiędzy dwoma źródłami sygnału, oferując jednocześnie dużą elastyczność montażu. Moduł sprawdzi się w projektach robotycznych, modelarskich oraz systemach autonomicznych, gdzie wymagane jest dynamiczne przełączanie sterowania lub zwiększenie bezpieczeństwa i kontroli nad sygnałami RC. Pololu 2807
Multiplexer w wersji zmontowanej umożliwia szybkie i niezawodne przełączanie czterech kanałów RC pomiędzy dwoma źródłami sterowania bez potrzeby lutowania. Moduł sprawdzi się w systemach szkoleniowych typu „buddy”, projektach z przełączaniem sterowania ręcznego i autonomicznego oraz w aplikacjach wymagających bezpiecznego i elastycznego zarządzania sygnałami RC. Pololu 2806
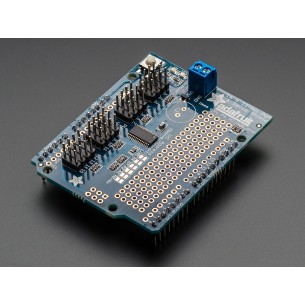
Rozszerzenie typu shield dla Arduino ze sterownikiem PWM 16-kanałowym, 12-bitowym pozwalającym na równoczesne sterowanie 16 serwomechanizmami za pomocą interfejsu I2C. Adafruit 1411
Brak towaru
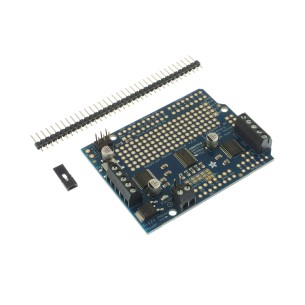
Adafruit Motorshield to shield umożliwiający łatwe sterowanie silnikami DC, krokowymi oraz serwomechanizmami przy pomocy Arduino. Zawiera sterowniki silników DC, krokowych oraz wyjścia do sterowania serwomechanizmami. Umożliwia adresowanie oraz łączenie ekspanderów (do 32) i sterowanie przy pomocy jednej płytki Arduino. Adafruit 1438
Płytka rozszerzeniowa do minikomputera Raspberry Pi dodająca możliwość sterowania do 16 serw sygnałem PWM. Potrafi generować sygnał do 1,6 kHz z 12-bitową rozdzielczością. Dzięki sterowaniu za pomocą interfejsu I2C, do równoczesnego sterowania serw wystarczy użycie 2 pinów. Adafruit 2327
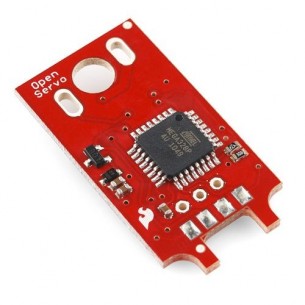
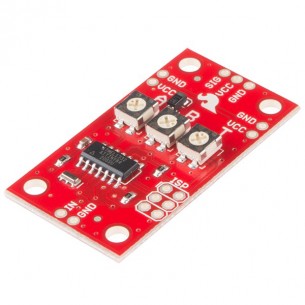
Moduł do sterowania serwem. Parametry pracy konfigurowane są za pomocą potencjometrów umieszczonych na płytce. SparkFun WIG-13118
Brak towaru
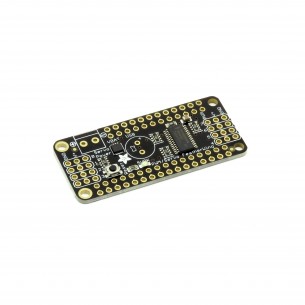
Ten moduł umożliwia rozszerzenie możliwości płytek serii Feather o 8 12-bitowych wyjść PWM, których można użyć np. do sterowania serwami lub diodami LED. Adafruit 2928
Płytka umożliwiająca sterowanie serwomechanizmem bez konieczności programowania. Sparkfun WIG-13872
Brak towaru
Sterownik serwomechanizmów do zestawów FPGA TerasIC serii DE umożliwia sterowanie maksymalnie 24 serwomechanizmami. Dostarcza napięcie 6 V do zasilania serwomechanizmów. W zestawie serwomechanizm MG966R i taśma do połączenia z zestawem FPGA. P0288
Sterownik serw w postaci shieldu Arduino. Pozwala sterować 7 serwami z serii Dynamixel AX. Komunikacja odbywa się za pomocą interfejsu SPI. DFRobot DRI0027
Brak towaru
Multiplexer w wersji zmontowanej umożliwia szybkie i niezawodne przełączanie czterech kanałów RC pomiędzy dwoma źródłami sterowania bez potrzeby lutowania. Moduł sprawdzi się w systemach szkoleniowych typu „buddy”, projektach z przełączaniem sterowania ręcznego i autonomicznego oraz w aplikacjach wymagających bezpiecznego i elastycznego zarządzania sygnałami RC. Pololu 2806