- Obecnie brak na stanie



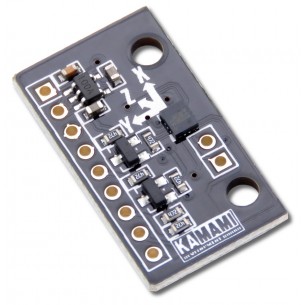
Prosty w użyciu czujnik pola magnetycznego i przyśpieszenia, interfejs I2C lub SPI, zasilanie 2,5-5,5V, zakres pomiarowy magnetometru: ±2~±12Gs, zakres pomiarowy akcelerometru: ±2~±16g, kompatybilny z Arduino i Raspberry Pi. Pololu 2127
Moduł LSM303D to połączenie cyfrowego 3-osiowego magnetometru i 3-osiowego akcelerometru, które jest idealnym rozwiązaniem dla kompasu z kompensacją przechyleń. Układ dokonuje 6 niezależnych pomiarów, zakres pomiarowy magnetometru wynosi ±2, ±4, ±8, lub ±12Gs a zakres pomiarowy akcelerometru wynosi ±2, ±4, ±6, ±8, lub ±16g. Urządzenie ma interfejs komunikacyjny I2C oraz SPI, regulator napięcia 3.3V i wbudowany konwerter stanów logicznych, który umożliwia zasilanie napięciem 2,5-5,5V. Odstęp między pinami równy 3mm umożliwia łatwe połączenie z płytkami stykowymi i płytkami uniwersalnymi.
W porównaniu do poprzednich wersji modułu, LSM303DLM oraz LSM303DLHC, moduł LSM303D został udoskonalony pod wieloma względami, m.in. ma szerszy zakres pomiaru natężenia pola magnetycznego. Układ ma inną konfigurację pinów niż LSM303DLM oraz LSM303DLHC, więc wymaga zmiany kodu obsługującego go programu, ponieważ akcelerometr oraz magnetometr są widziane jako jedno urządzenie ze wspólnym adresem I2C, zamiast dwóch urządzeń z odmiennymi adresami. W odróżnieniu od poprzednich wersji modułu, LSM303D ma magistralę SPI.
Czujnik LSM303D ma wiele opcji konfiguracyjnych, między innymi dynamiczny wybór 7 czułości magnetometru i akcelerometru, wybór częstotliwości próbkowania pomiarów i 2 niezależnie programowalne sygnały zewnętrznych przerwań. Magnetometr oraz akcelerometr mogą być niezależnie włączane lub wyłączane dla oszczędzania energii. Sześć niezależnych odczytów natężenia pola magnetycznego oraz przyśpieszenia jest wysyłane na wyjście cyfrowe, które może być programowo skonfigurowane jako interfejs I2C lub SPI.
Płytka ma wbudowany regulator napięcia wyjściowego zapewniający 3,3 V, który pozwala na zasilanie czujnika LSM303D napięciem 2,5-5,5 V, co zapewnia kompatybilność z Arduino i Raspberry Pi. Wyjście regulatora jest podłączone do pinu VDD i może dostarczać niemal 150mA do urządzeń zewnętrznych. Płytka stykowa ma obwód dokonujący konwersji stanów logicznych wejścia danych oraz zegara I2C/SPI do poziomu napięcia na pinie VIN, dzięki czemu można w łatwy sposób podłączyć płytkę do układów zasilanych napięciem 5V.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
KAmodLSM6DS3 to moduł pozwalający na pomiar przyspieszenia oraz wartości prędkości kątowej. Ma wbudowany stabilizator napięcia oraz translatory poziomów na liniach SDA/SCL, dzięki czemu może być wykorzystany w systemach zasilanych napięciem 2,5-5,5V
Brak towaru
Zestaw AVT do samodzielnego montażu miniaturowego przypominacza. AVT5638 B
Brak towaru
Brak towaru
Brak towaru
Niewielki silnik Pololu z plastikową przekładnią 120:1, napięciem pracy 4,5 V, prędkością 120 rpm i momentem obrotowym 1,4 kg*cm (20 oz-in), D-kształtnym wałem pod kątem 90° względem obustronnych osi silnika. Pololu 1519
Brak towaru
Brak towaru
Niewielki silnik z plastikową przekładnią 120:1, wałem o średnicy 3mm w kształcie litery "D", napięciem pracy 4,5 V, poborem prądu od 0,08 A do 0,8 A, prędkością 120 RPM i maksymalnym momentem obrotowym 1,4 kg*cm. Pololu 1125
Brak towaru
Brak towaru
Filament firmy ROSA3D wykonany z wysokiej jakości polimeru ASA. Na szpuli nawinięte jest 0,7 kg filamentu o średnicy 1,75 mm. ROSA3D ASA Black
Brak towaru
Brak towaru
Brak towaru
Jarosław Doliński
https://kamami.pl/ksiazki-avr/197200-mikrokontrolery-avr-niezbednik-programisty-e-book.html
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Prosty w użyciu czujnik pola magnetycznego i przyśpieszenia, interfejs I2C lub SPI, zasilanie 2,5-5,5V, zakres pomiarowy magnetometru: ±2~±12Gs, zakres pomiarowy akcelerometru: ±2~±16g, kompatybilny z Arduino i Raspberry Pi. Pololu 2127