















170,89 zł Netto
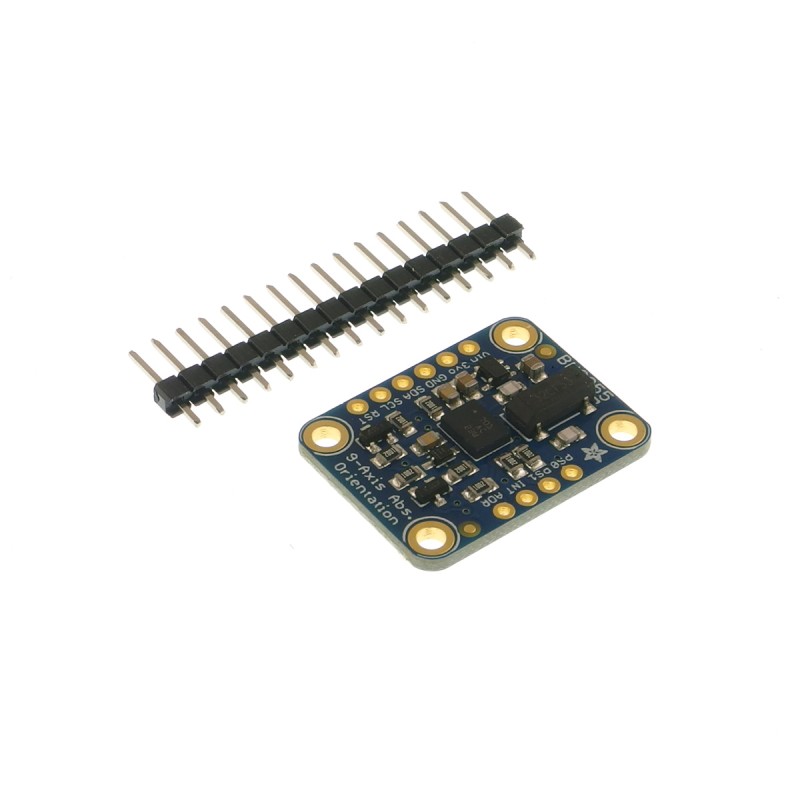
Moduł z układem BNO055 (akcelerometr, żyroskop oraz magnetometr), dzięki specjalnemu algorytmowi, wysyła poprzez magistralę I2C dane o orientacji bezwzględnej w postaci np. wektorów kąta Eulera. Adafruit 2472
Adafruit 2472
DESCRIPTION
If you've ever ordered and wire up a 9-DOF sensor, chances are you've also realized the challenge of turning the sensor data from an accelerometer, gyroscope and magnetometer into actual "3D space orientation"! Orientation is a hard problem to solve. The sensor fusion algorithms (the secret sauce that blends accelerometer, magnetometer and gyroscope data into stable three-axis orientation output) can be mind-numbingly difficult to get right and implement on low cost real time systems.

Bosch is the first company to get this right by taking a MEMS accelerometer, magnetometer and gyroscope and putting them on a single die with a high speed ARM Cortex-M0 based processor to digest all the sensor data, abstract the sensor fusion and real time requirements away, and spit out data you can use in quaternions, Euler angles or vectors.
Rather than spending weeks or months fiddling with algorithms of varying accuracy and complexity, you can have meaningful sensor data in minutes thanks to the BNO055 - a smart 9-DOF sensor that does the sensor fusion all on its own! You can read the data right over I2C and Bob's yer uncle.
The BNO055 can output the following sensor data:
Handy, right? So we placed this very nice sensor on its own breakout, complete with 3.3V regulator, logic level shifting for the Reset and I2C pins, an external 32.768KHz crystal (recommended for best performance), and breakouts for some other pins you might find handy. Comes assembled and tested, with a small piece of header. Some soldering is required to attach the header to the breakout PCB, but its pretty easy work. Best of all you can get started in 10 minutes with our handy tutorial on assembly, wiring, Arduino library and Processing graphical interface, and more!
TECHNICAL DETAILS
LINKS
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Wszechstronny sensor 9DOF z akcelerometrem, magnetometrem i żyroskopem, obsługujący interfejsy I²C i SPI, umożliwiający precyzyjny pomiar ruchu, orientacji i temperatury, z łatwą integracją z Arduino i mikrokontrolerami. Adafruit 3387
Pmod NAV to moduł wyposażony w układ IMU 9DOF LSM9DS1 (akcelerometr, żyroskop, magnetometr) oraz w barometr (LPS25HB). Do komunikacji z modułem służy interfejs SPI. Digilent 410-326
Brak towaru
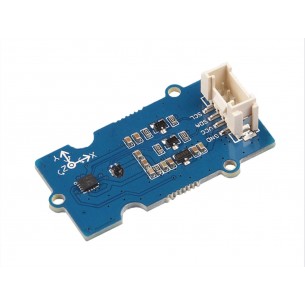
Moduł z 9-osiowym czujnikiem IMU, który łączy w sobie akcelerometr i żyroskop (układ ICM20600) oraz magnetometr (układ AK09918). Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs I2C. Seeed Studio 101020585
Brak towaru
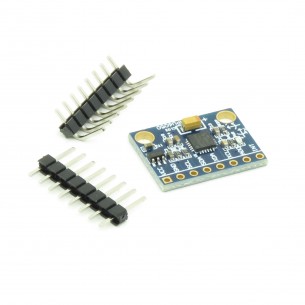
Moduł 6DoF z układem MPU6050 (3-osiowy akcelerometr, 3-osiowy żyroskop) zasilany napięciem 3-5 V. Interfejs komunikacyjny I2C
Brak towaru
Moduł z 6-osiowym czujnikiem ruchu BMI160 (akcelerometr i żyroskop) z 16-bitową rozdzielczością danych. Zasilany napięciem z zakresu od 3,2 do 6 V. Komunikacja I2C. DFRobot SEN0250
Niewielki moduł IMU 9 DoF z 3-osiowym żyroskopem i akcelerometrem (LSM6DSO) i 3-osiowym magnetometrem (LIS3MDL). Wyposażony jest w interfejs I2C, stabilizator napięcia oraz konwerter poziomów napięć. Pololu 2862
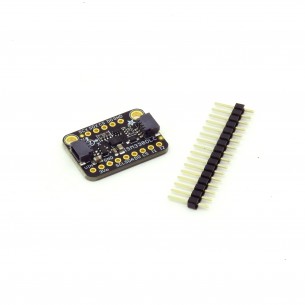
Moduł z 3-osiowym akcelerometrem i żyroskopem ISM330DHCX. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C lub SPI. Adafruit 4502
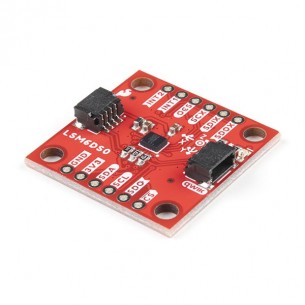
Moduł z 6-osiowym czujnikiem IMU LSM6DSO, który łączy 3-osiowy akcelerometr i żyroskop oraz bufor FIFO o pojemności 9 kB i funkcje obsługi zdarzeń. Komunikuje się przez I2C lub SPI. SparkFun SEN-18020
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSO32. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4692
KAmodLSM303C to moduł z trójosiowym akcelerometrem i magnetometrem LSM303C firmy STMicroelectronics. Układ posiada cyfrowe wyjście sygnału (magistrala I2C lub SPI) i umożliwia pomiar przyspieszeń oraz wartości pola magnetycznego w trzech osiach.
Moduł czujnika do zastosowania w obszarze wirtualnej rzeczywistości (VR). Został oparty o układ BNO080, który integruje akcelerometr, żyroskop oraz magnetometr z mikrokontrolerem z rdzeniem ARM Cortex M0+. SparkFun SEN-14686
Brak towaru
Moduł z 9-osiowym czujnikiem IMU ICM-20948 (3-osiowym akcelerometrem, żyroskopem i magnetometrem oraz DMP) i czujnikiem ciśnienia BMP280. Komunikacja przez I2C. Waveshare 10 DOF IMU Sensor (D)
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU-6050. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C. Adafruit 3886
Redshift Labs UM7 to moduł zawierający 3-osiowy żyroskop, 3 osiowy- akcelerometr oraz 3-osiowy magnetometr. Może on pracować w systemie AHRS. Posiada wbudowany mikrokontroler, który przy użyciu rozszerzonego filtru Kalmana oblicza orientacje. Pololu 2764
Moduł z 3-osiowym akcelerometrem i żyroskopem LSM6DSV16X. Jest energooszczędnym IMU zoptymalizowanym pod kątem urządzeń IoT z funkcjami przetwarzania danych z wykorzystaniem uczenia maszynowego. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C. SparkFun SEN-21325
GY-9255 to moduł 9 Degrees of Freedom (9DoF) z układem MPU-9255 firmy InvenSense. Posiada wbudowany żyroskop, akcelerometr i magnetometr
Brak towaru
Moduł z układem BNO055 (akcelerometr, żyroskop oraz magnetometr), dzięki specjalnemu algorytmowi, wysyła poprzez magistralę I2C dane o orientacji bezwzględnej w postaci np. wektorów kąta Eulera. Adafruit 2472