39,90 zł Netto
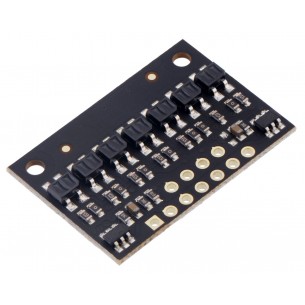
QTR-8RC Reflectance Sensor Array
QTR-8RC Reflectance Sensor Array
This sensor module has 8 IR LED/phototransistor pairs mounted on a 0.375" pitch, making it a great detector for a line-following robot. Pairs of LEDs are arranged in series to halve current consumption, and a MOSFET allows the LEDs to be turned off for additional sensing or power-savings options. Each sensor provides a separate digital I/O-measurable output.
Note: The QTR-8RC reflectance sensor array requires digital I/O lines to take readings. The similar QTR-8A reflectance sensor array is available with analog outputs, and the reflectance sensor is available individually as a QTR-1RC reflectance sensor or QTR-1A reflectance sensor.
 |
The QTR-8RC reflectance sensor array is intended as a line sensor, but it can be used as a general-purpose proximity or reflectance sensor. The module is a convenient carrier for eight IR emitter and receiver (phototransistor) pairs evenly spaced at intervals of 0.375" (9.525 mm). Each phototransistor uses a capacitor discharge circuit that allows a digital I/O line on a microcontroller to take an analog reading of reflected IR by measuring the discharge time of the capacitor. Shorter capacitor discharge time is an indication of greater reflection.
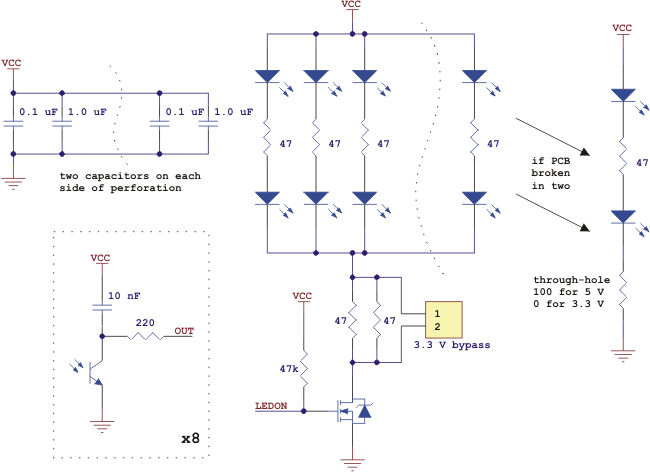
The outputs are all independent, but the LEDs are arranged in pairs to halve current consumption. The LEDs are controlled by a MOSFET with a gate normally pulled high, allowing the LEDs to be turned off by setting the MOSFET gate to a low voltage. Turning the LEDs off might be advantageous for limiting power consumption when the sensors are not in use or for varying the effective brightness of the LEDs through PWM control.
The LED current-limiting resistors for 5 V operation are arranged in two stages; this allows a simple bypass of one stage to enable operation at 3.3 V. The LED current is approximately 20-25 mA, making the total board consumption just under 100 mA. The schematic diagram of the module is shown below:
 |
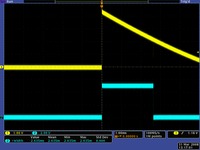 |
| QTR-1RC output (yellow) when 1/8" above a black line and microcontroller timing of that output (blue). |
|---|
Like the Parallax QTI, the QTR-8RC module has eight identical sensor outputs that require a digital I/O line capable of first charging the output capacitor (by driving the line high) and then measuring the time for the capacitor to discharge through the phototransistor. This measurement approach has several advantages, especially when coupled with the ability of the QTR-8RC module to turn off LED power:
The typical sequence for reading a sensor is:
These steps can typically be executed in parallel on multiple I/O lines.
With a strong reflectance, the discharge time can be as low as several dozen microseconds; with no reflectance, the discharge time can be up to a few milliseconds. The exact time of the discharge depends on your microcontroller’s I/O line characteristics. Meaningful results can be available within 1 ms in typical cases (i.e. when not trying to measure subtle differences in low-reflectance scenarios), allowing up to 1 kHz sampling of all 8 sensors. If lower-frequency sampling is sufficient, substantial power savings can be realized by turning off the LEDs. For example, if a 100 Hz sampling rate is acceptable, the LEDs can be off 90% of the time, lowering average current consumption from 100 mA to 10 mA.
Our Pololu AVR library provides functions that make it easy to use these sensors with our Orangutan robot controllers and other AVR-based controller boards such as Arduinos. Please see section 11 of our library command reference for more information.
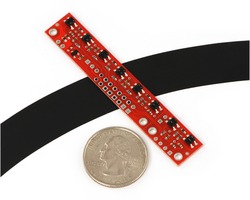
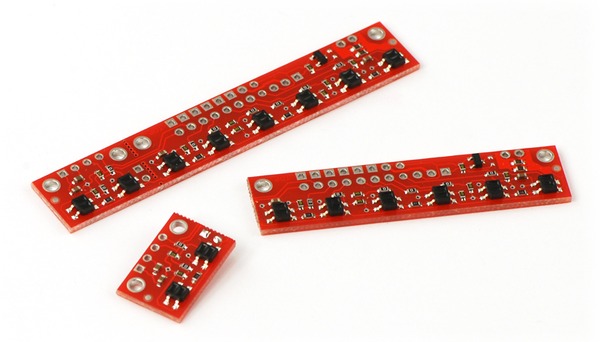
If you don’t need or cannot fit all eight sensors, you can break off two sensors and still use all 8 sensors as two separate modules, as shown below. The PCB can be scored from both sides along the perforation and then bent until it snaps apart. Each of the two resulting pieces will function as an independent line sensor.
 |
This module ships with a 25-pin 0.1" header strip and a 100 Ohm through-hole resistor as shown below.
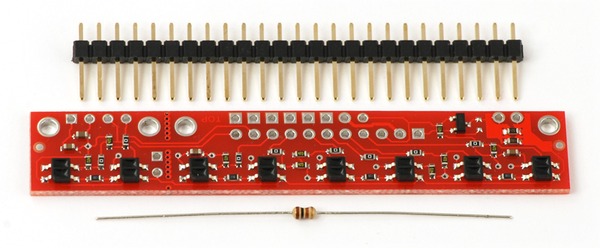 |
You can break the header strip into smaller pieces and solder them onto your reflectance sensor array as desired, or you can solder wires directly to the unit or use a right-angle header strip for a more compact installation. The pins on the module are arranged so that they can all be accessed using either an 11×1 strip or an 8×2 strip.
The resistor is required to make the two-sensor array functional after the original eight-sensor array is broken into two pieces. This resistor is only needed once the board has been broken.
 |
| Solder the included resistor to the 2-sensor array piece as shown to make the separated piece functional. |
|---|
 |
Pololu Ball Caster with 3/8" Metal Ball |
 |
QTR-1RC Reflectance Sensor |
 |
Pololu Carrier with Sharp GP2Y0D810Z0F Digital Distance Sensor 10cm |
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Moduł czujnika podczerwieni, do wykrywania obiektów w bliskim otoczeniu lub wykrywania linii w robocie typu "Line Follower", zgodny z RoHS
Brak towaru
Niewielki moduł z czujnikiem odbiciowym QRE1113GR. Czujnik zbudowany jest z diody LED IR oraz fototranzystora IR. Z jego pomocą możliwe jest określenie jasności położenia, nad którym się znajduje, może być wykorzystywany np. do wykrywania czarnej linii w robotach typu Linefollower. SparkFun ROB-09453
Brak towaru
Niewielki moduł z czujnikiem odbiciowym QRE1113GR. Czujnik zbudowany jest z diody LED IR oraz fototranzystora IR. Z jego pomocą możliwe jest określenie jasności położenia, nad którym się znajduje, może być wykorzystywany np. do wykrywania czarnej linii w robotach typu Linefollower. SparkFun ROB-09454
Brak towaru
Moduł matrycy sześciu czujników odbiciowych przeznaczony do robota Zumo. Moduł umożliwia dodanie w łatwy sposób wykrywania linii lub wykrywania krawędzi do robota. Pololu 1419
QTR-1A Reflectance Sensor (2-Pack)
QTR-1RC Reflectance Sensor (2-Pack)
Brak towaru
Matryca QTR-3A umożliwia precyzyjny analogowy pomiar odbicia podłoża w kompaktowej formie. Matryca sprawdza się w robotach śledzących linię i systemach detekcji kontrastu, oferując niezależne kanały pomiarowe oraz łatwą integrację z mikrokontrolerami wyposażonymi w przetworniki ADC. Pololu 2456
Brak towaru
Czujnik line follower dla robotów RedBot z sensorem QRE1113GR z 3-pinowym złączem, zasilanie 5V, pobór prądu 25mA. SEN-11769
Brak towaru
Czujnik odbiciowy pozwala na "śledzenie linii", co jest podstawą działania robotów takich, jak na przykład Line Follower; może także posłużyć do wykrywania krawędzi. DFRobot SEN0017
Moduł z ośmioma czujnikami QRE1113 przeznaczony do budowy robotów line follower. Moduł komunikuje się przez interfejs I2C, zasilany jest napięciem 5V, jest wyposażony w diody LED sygnalizujące odczyty sensorów oraz regulację jasności IR. SEN-13582
Brak towaru
W komplecie: czujnik gazu, czujnik koloru, czujnik płomieni, czujnik Halla, czujnik odbiciowy podczerwieni, laserowy czujnik odległości, laserowy czujnik wilgotności gleby, enkoder, czujnik dźwięku, czujnik temperatury i wilgotności, czujnik wychylenia, czujnik UV oraz czujnik poziomu cieczy. Moduły są kompatybilne z Arduino
Czujnik odbiciowy IR (podczerwień) firmy Waveshare pozwala na śledzenie linii, co jest podstawą działania robotów line follower, może także posłużyć do wykrywania krawędzi. Czujnik ma wyjście analogowe i cyfrowe, czułość czujnika jest regulowana. Waveshare Infrared Reflective Sensor
Moduł z czujnikiem odbiciowym (czujnikiem linii) RS-06WD. Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs cyfrowy. Seeed Studio 101020172
Moduł z 7 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4207
QTR-8RC Reflectance Sensor Array