")


14,75 zł Netto
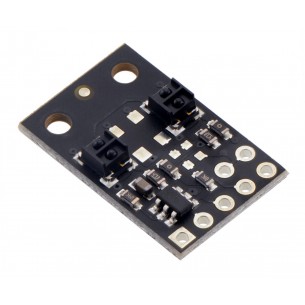
Moduł z 1 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4441
Czujnik obiciowy składający się z jednego transoptora typu QTRX z możliwością sterowania jasnością podczerwonego LED-a. Sensory na płytce są średnio zagęszczone (MD), a odległość między nimi wynosi 8mm. Moduł może być zasilany napięciem z zakresu od 2,9 V do 5,5 V i niezależnie od napięcia zasilania pobiera prąd do 5 mA. Optymalna odległość czujnika od podłoża to 10 mm, a maksymalna odległość wynosi 30 mm. Moduł idealnie nadaje się do wykrywania zmian w odbiciu światła, dzięki czemu może być stosowany do wykrywania krawędzi podłoża lub do śledzenia linii w robotach typu linefollower.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Podwozie Romi Chassis Kit to idealna baza do budowy niewielkiego robota mobilnego. W zestawie znajdziemy wszystkie niezbędne elementy mechaniczne do budowy kołowego robota mobilnego. Zestaw do samodzielnego montażu. Pololu 3504
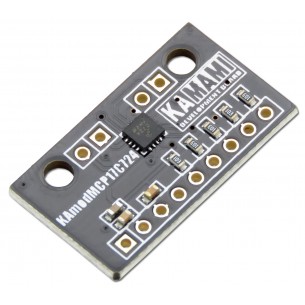
KAmodMPC17C724 to moduł z podwójnym mostkiem H typu MPC17C724. Układ pozwala na sterowanie dwoma silnikami szczotkowymi DC lub jednym bipolarnym silnikiem krokowym. Sterownik pracuje przy napięciu z zakresu 2,7 - 5,5 V i może współpracować z silnikami o poborze prądu do 0,4 A.
Moduł z mikrokontrolerem ATMega4809 z rodziny AVR (48 kB Flash, 6 kB SRAM, 256 B EEPROM). Moduł ma dwa 15-pinowe złącza wyposażone w GPIO, SPI, I2C, PWM, USART, DAC i ADC. Arduino ABX00028
Brak towaru
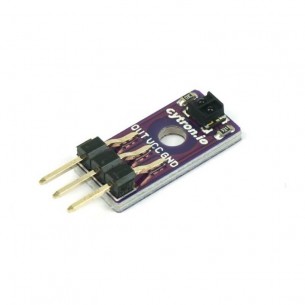
Moduł z analogowym czujnikiem odbiciowym IR. Zbudowany z diody IR oraz fototranzystora, który mierzy natężenie odbitego światła. Wykorzystywany m.in. w robotach śledzących linię. Cytron MAKER-REFLECT
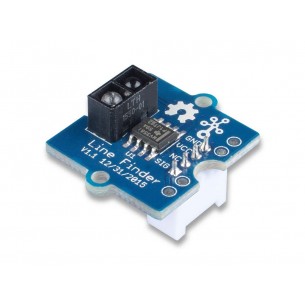
Moduł z czujnikiem odbiciowym (czujnikiem linii) RS-06WD. Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs cyfrowy. Seeed Studio 101020172
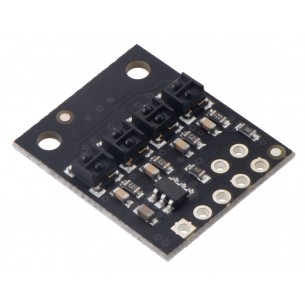
Moduł z 4 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4304
Moduł z 11 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4111
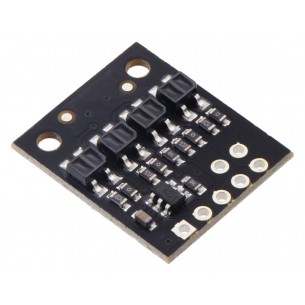
Moduł z 4 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4204
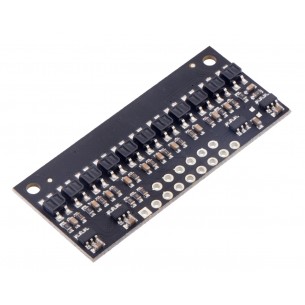
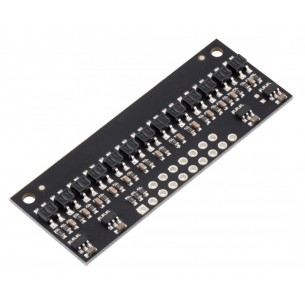
Moduł z 11 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4411
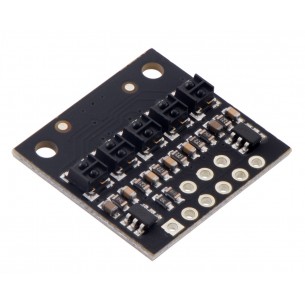
Moduł z 5 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4305
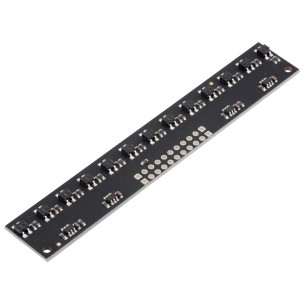
Moduł z 13 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4253
Moduł czujnika podczerwieni, do wykrywania obiektów w bliskim otoczeniu lub wykrywania linii w robocie typu "Line Follower", zgodny z RoHS
Niewielki moduł z czujnikiem odbiciowym QRE1113GR. Czujnik zbudowany jest z diody LED IR oraz fototranzystora IR. Z jego pomocą możliwe jest określenie jasności położenia, nad którym się znajduje, może być wykorzystywany np. do wykrywania czarnej linii w robotach typu Linefollower. SparkFun ROB-09453
Brak towaru
Liniowy sensor odbiciowy Pololu QTR-8A z ośmioma kanałami optycznymi, niezależnymi wyjściami każdego kanału i możliwością rozdzielnia na dwie niezależne części: 2- i 6-kanałową.
Brak towaru
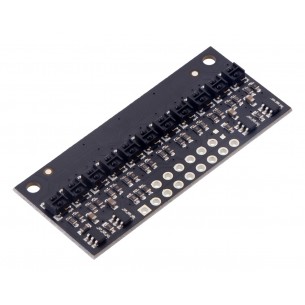
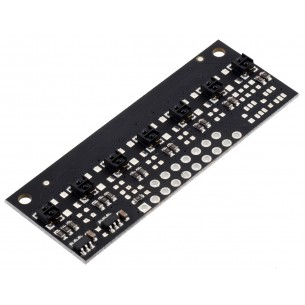
Moduł z 7 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4447
QTR-1A Reflectance Sensor (2-Pack)
Brak towaru
Moduł z 2 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4442
Brak towaru
Moduł z 13 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4113
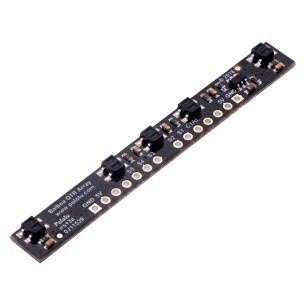
Moduł z 5 czujnikami odbiciowymi do robota balansującego Balboa 32U4. Pololu 3577
Moduł z 1 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4441