")
")
")
")
")
")
")
")

708,75 zł Netto
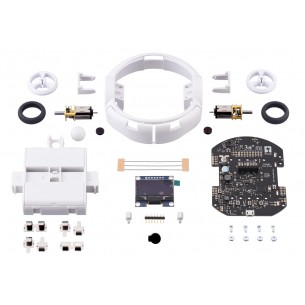
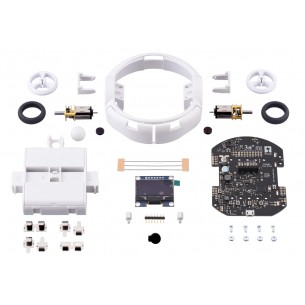
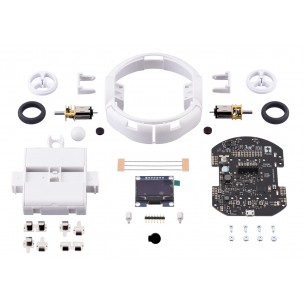
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja do montażu. Pololu 4977
Pololu 3pi+ 32U4 to zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem, dzięki czemu nie wymaga zewnętrznego programatora i może być programowany przy użyciu przewodu microUSB. Stanowi znakomitą platformę dla osób rozpoczynających przygodę z programowaniem w języku Arduino lub czystym C/C++ i robotyką.
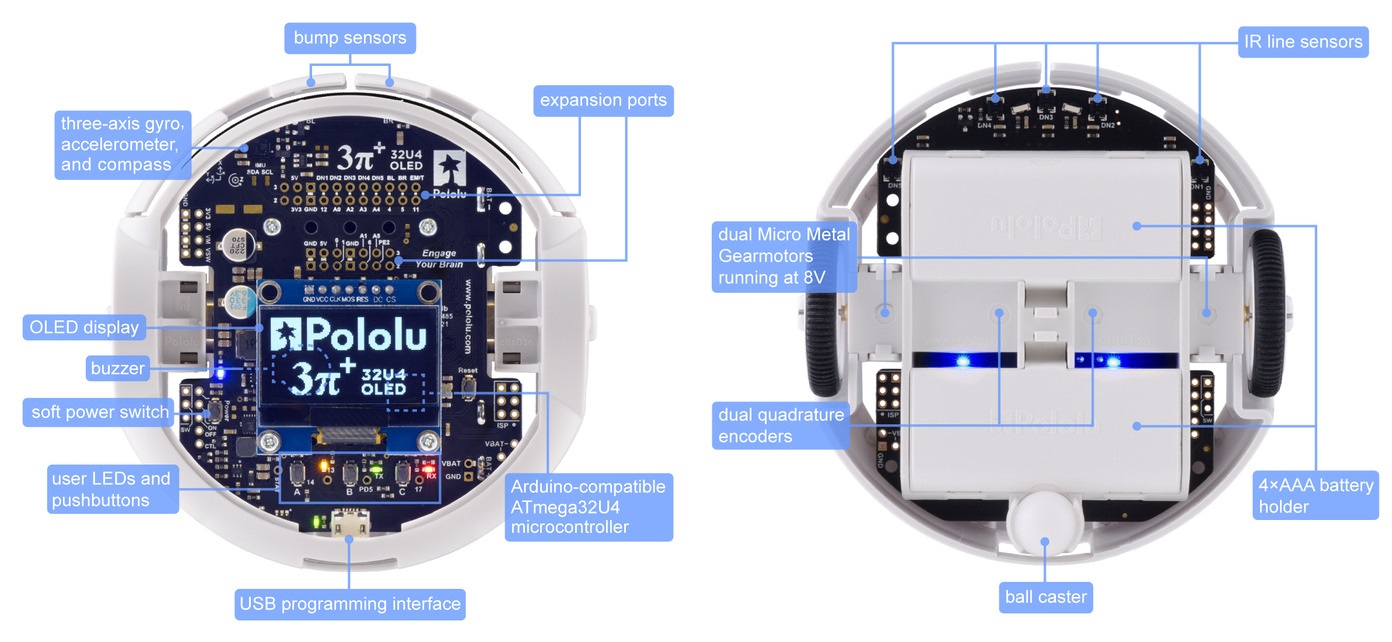
Płytka sterująca wyposażona została w dwa sterowniki silników DRV8838, enkodery oraz elastyczny system zasilania. Wersja Hyper Edition porusza się dzięki 2 silnikom Pololu 15:1 HPCB, a zasilana jest przez cztery baterie AAA.
Uwaga!
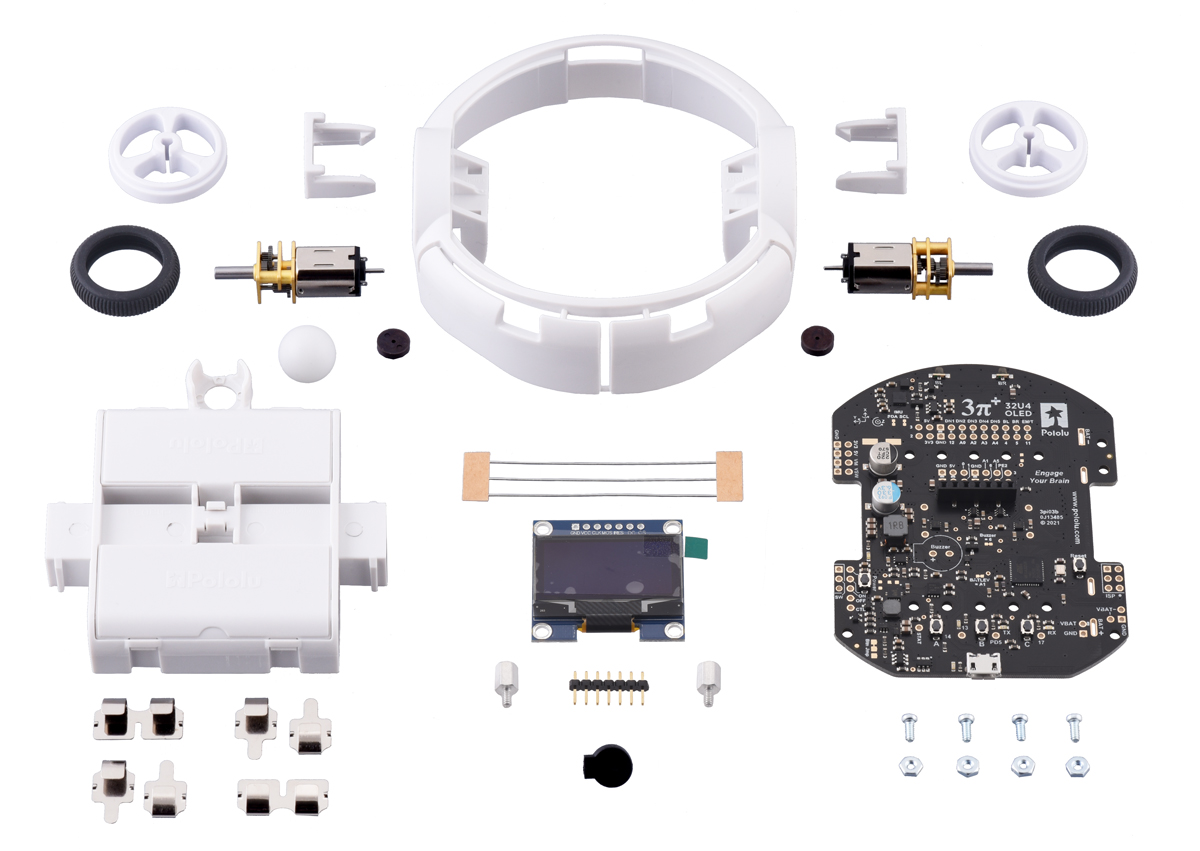
Zestaw nie zawiera baterie AAA niezbędnych do uruchomienia robota. Należy je zakupić oddzielnie.Robot wyposażony został w pięć czujników odbiciowych umieszczonych na spodzie platformy, dwa czujnik zderzeniowe z przodu robota oraz czujniki IMU (akcelerometr, żyroskop, magnetometr). Poza tym na płytce umieszczono diody sygnalizacyjne, przyciski użytkownika, buzzer oraz wyświetlacz OLED.
Mikrokontroler sterujący robotem wyposażony został w bootloader Arduino i może być programowany przy pomocy środowiska Arduino IDE z wykorzystaniem dedykowanych bibliotek. Do zaprogramowania robota za pomocą Arduino IDE wymagany jest jedynie przewód microUSB (brak w zestawie). Zaawansowani użytkownicy mogą również programować robota w języku C przy użyciu popularnych środowisk takich jak Atmel Studio. Do obsługi poszczególnych układów robota dostępne są bogate i łatwe w obsłudze biblioteki Pololu AVR C/C++ Library. W tym przypadku wymagany jest zewnętrzny programator.
Pełna dokumentacja oraz instrukcja obsługi dostępna jest na stronie produktu.
Wprowadzone modyfikacje w Pololu 3pi+ 32U4 względem Pololu 3pi:
Robot dostępny jest w kilku wersjach zarówno w pełni złożony, jak i jako zestaw do samodzielnego montażu.
| Wersja | Silniki | Prędkość maksymalna | Komentarz |
|---|---|---|---|
| Standard Edition, zmontowany | 30:1 MP 6V | 1,5 m/s | dobre połączenie szybkości i sterowalności |
| Standard Edition, do montażu | |||
| Turtle Edition, zmontowany | 75:1 LP 6V | 0,4 m/s | najdłuższa żywotność baterii, najłatwiejsza do kontrolowania, dobra dla robotów rojowych lub kursów wprowadzających do robotyki |
| Turtle Edition, do montażu | |||
| Hyper Edition, zmontowany | 15:1 HPCB 6V | 4 m/s | bardzo szybki i trudny do kontrolowania, łatwy do uszkodzenia, zalecane dla zaawansowanych użytkowników |
| Hyper Edition, do montażu |
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Bateria Maxell AAA (R3, LR03, mały paluszek) 1 sztuka, napięcie 1.5V, pojemność 1200mAh
Bateria GP Super AAA (R3, LR03, mały paluszek) 6 sztuk, napięcie 1,5V
Przewód z wtykami USB typ A oraz microUSB typ B 2.0, długość przewodu 1 m. LANBERG CCP-MUSB2-AMBM-W-1M
Przewód z wtykami USB typ A oraz microUSB typ B 2.0, długość przewodu 1,8 m. LANBERG CA-USBM-10CC-0018-BK
Przewód z wtykami USB typ A oraz microUSB typ B 2.0, długość przewodu 1,8 m. LANBERG CA-USBM-10CC-0018-W
Przewód z wtykami USB typ A oraz microUSB typ B 2.0, długość przewodu 1 m. LANBERG CA-USBM-10CC-0010-BK
Zestaw do budowy podwozia do robota Pololu 3pi+ 32U4. Umożliwia budowę robota mobilnego z napędem różnicowym w oparciu o wybrany silnik micro Pololu i elektronikę. Pololu 3725
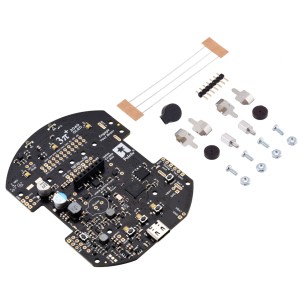
Kontroler przeznaczony do robota Pololu 3pi+ 32U4. Został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino. Wersja do użytku z wyświetlaczem OLED. Pololu 4973
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino. Wersja do montażu. Pololu 3740
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino. Wersja do montażu. Pololu 3741
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino. Wersja do montażu. Pololu 3739
Brak towaru
Kontroler przeznaczony do robota Pololu 3pi+ 32U4. Został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino. Pololu 3735
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja zmontowana. Pololu 4975
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja zmontowana. Pololu 4976
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja zmontowana. Pololu 4974
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja do montażu. Pololu 4978
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja do montażu. Pololu 4979
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja do montażu. Pololu 4977
Brak towaru
Kontroler przeznaczony do robota Pololu 3pi+ 32U4. Został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino. Wersja do użytku z wyświetlaczem OLED. Pololu 4973
Kontroler przeznaczony do robota Pololu 3pi+ 2040. Został oparty o mikrokontroler Raspberry Pi RP2040 oraz wyposażony jest w zestaw czujników. Wersja do użytku z wyświetlaczem OLED. Pololu 5006
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu. Został oparty o mikrokontroler Raspberry Pi RP2040 i wyposażony jest w wyświetlacz OLED oraz zestaw czujników. Wersja do montażu. Pololu 5005
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu. Został oparty o mikrokontroler Raspberry Pi RP2040 i wyposażony jest w wyświetlacz OLED oraz zestaw czujników. Wersja do montażu. Pololu 5004
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu. Został oparty o mikrokontroler Raspberry Pi RP2040 i wyposażony jest w wyświetlacz OLED oraz zestaw czujników. Wersja do montażu. Pololu 5003
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu. Został oparty o mikrokontroler Raspberry Pi RP2040 i wyposażony jest w wyświetlacz OLED oraz zestaw czujników. Wersja zmontowana. Pololu 5002
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja do montażu. Pololu 4977