
















7 214,70 zł Netto
Terasic Spider to sześcionożny robot kroczący z 18 serwomechanizmami sterowanymi przez płytkę Altera DE0-Nano-SoC łączącą układ FPGA oraz procesor ARM Cortex-A9. Zestaw zawiera złożonego robota oraz liczne akcesoria. P0425
Terasic Spider to sześcionożny robot kroczący z 6 kończynami poruszanymi przez 3 serwomechanizmy każda (łącznie 18 serwomechanizmów). Serwomechanizmy sterowane są przez sygnały PWM generowane z płyty Altera DE0-Nano-SoC osadzonej wewnątrz robota Terasic Spider. Robot może być zdalnie sterowany przez urządzenie z systemem Android z modułem Bluetooth. Aplikacja pozwala na ruch robotem w czterech kierunkach, pochylanie w oparciu o czujnik przechyłu oraz wykonywanie predefiniowanych ruchów.
Kod źródłowy oprogramowania dla układu FPGA, procesora ARM oraz aplikacji pod system Android został w pełni udostępniony dla użytkowników, dzieki czemu robot może być rozwijany i modyfikowany. Płytka sterownika serwomechanizmów posiada dodatkowe złącze 2x20 pin, dzięki czemu do robota możemy podłączyć dodatkowe czujniki np. odległości czy kamerę.

Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
TerasIC DE0 to kompletny zestaw ewaluacyjny oparty na FPGA Cyclone III, zaprojektowany do nauki, testowania i wdrażania systemów cyfrowych. Oferuje szeroki zestaw interfejsów i peryferiów umożliwiających tworzenie złożonych projektów zarówno edukacyjnych, jak i przemysłowych.
Brak towaru
Insectbot Hexa Robot Kit to zestaw elementów do budowy robota z kontrolerem Bluno Beetle (ATmega328 + Bluetooth 4.0). Robot porusza się dzięki trzem serwomechanizmom. DFRobot KIT0090
Zestaw startowy VEEK-MT2-C5SoC z układem System-on-Chip z rodziny Cyclone V SX SoC. W zestawie 7-calowy wyświetlacz, 8 megapikselową kamerę z autofocusem, czujnik światła, żyroskop, magnetometr oraz 3 osiowy akcelerometr. Terasic K0160
Brak towaru
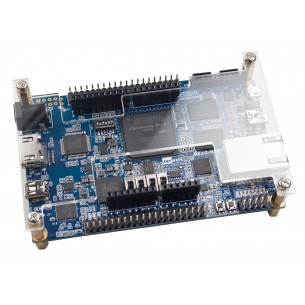
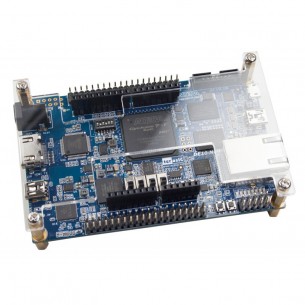
Zestaw startowy DE10-Nano Kit z układem System-on-Chip z rodziny Cyclone V SoC, w którym zintegrowano m.in. dwurdzeniowy procesor ARM Cortex-A9 oraz dużą matrycę FPGA. Zestaw wyposażono w programator-konfigurator-debugger JTAG. Terasic P0496
TerasIC AD/DA Data Conversion Card to uniwersalna karta konwersji danych analogowo-cyfrowych i cyfrowo-analogowych przeznaczona do systemów FPGA. Dzięki wysokiej szybkości próbkowania i wbudowanemu kodekowi audio doskonale sprawdza się w aplikacjach DSP, telekomunikacyjnych i edukacyjnych.
Brak towaru
TerasIC LT24 to moduł z wyświetlaczem LCD 2,4-calowym o rozdzielczości 320 x 240 pikseli. Wyświetlacz wyposażony jest w panel dotykowy rezystancyjny. Wyświetlacz przeznaczony jest do użycia z zestawami uruchomieniowymi TerasIC ze złączem GPIO 2x20. P0185
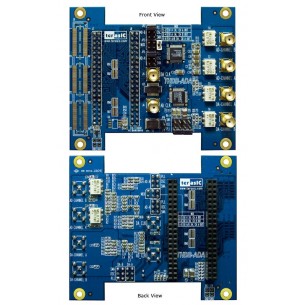
TerasIC ADA-GPIO to karta konwersji AD/DA umożliwiająca współpracę z wieloma płytami FPGA przez interfejsy GPIO i HSMC. Dzięki wysokiej szybkości próbkowania oraz szerokiej kompatybilności doskonale nadaje się do zastosowań DSP, edukacyjnych i komunikacyjnych.
Brak towaru
Moduł akceleratora obliczeń oparty na układzie FPGA Intel® Agilex™. Ma gniazdo PCI Express Gen 4.0 x16, dwa złącza 200G QSFP-DD i oferuje 32 GB DDR4. Terasic DE10-Agilex (P0701)
Brak towaru
Zestaw startowy FPGA wyposażony w Cyclone V GT z 301K LE i obsługuje PCIe Gen 2x4. Płytka posiada 1 GB pamięci DDR3, 64 MB pamięci SDRAM, interfejs UART-USB oraz rozszerzenia, takie jak GPIO i Arduino. Terasic P0559
Brak towaru
Moduł z kamerą przeznaczony do użycia z zestawami Terasic. Kamera posiada przetwornik o rozdzielczości 8 Megapikseli (3264 x 2448), do komunikacji wykorzystuje interfejs MIPI. Na module znalazł się również dekoder MIPI oraz układ HDMI-TX. Terasic P0449
Brak towaru
Zestaw rozwojowy z układem SoC FPGA Intel Arria 10. Dedykowany do przemysłowych aplikacji wbudowanych o wysokich wymaganiach wydajności. Terasic P0506
Brak towaru
Zestaw startowy FPGA z układem Intel Stratix 10 SX. Moduł posiada zintegrowane urządzenia nadawczo-odbiorcze, które przesyłają dane z prędkością do 28,3 Gb/s, dzięki czemu DE10-Pro jest w pełni zgodny z wersją 3.0 standardu PCI Express. DE10-Pro oferuje szybką pamięć równoległą Flash i cztery pamięci SO-DIMM, które mają 4 GB DDR4 SDRAM. Terasic P0627
Brak towaru
Moduł SoM z układem SoC łączącym FPGA z rdzeniem ARM Cortex-A9. Płytka wyposażona jest w złacze DDR4 Eadge (z zasialniem 3,3 V). Terasic P0553
Brak towaru
Zestaw startowy DE10-Nano Kit z układem System-on-Chip z rodziny Cyclone V SoC, w którym zintegrowano m.in. dwurdzeniowy procesor ARM Cortex-A9 oraz dużą matrycę FPGA. Zestaw wyposażono w programator-konfigurator-debugger JTAG. Terasic P0496
MAX 10 Plus jest zestawem deweloperskim opartym o układ FPGA od Intela, wyposażony w 50 000 programowalnych elementów logicznych. Digilent P0638
Brak towaru
DE1-SoC + 5 points multitouch display MTL2
VEEK-MT2S to płytka deweloperska oparta na układzie Cyclone V SX SoC Cyclone V SX SoC—5CSXFC6D6F31C6N. W zestawie, oprócz płytki z układem programowalnym FPGA, znajdują się również 7-calowy wyświetlacz TFT dotykowy o rozdzielczości 800 x 480 pikseli, kamera o rozdzielczości 8 Megapikseli (3264 x 2448 pikseli), czujnik światła czujnik IMU 9DOF (akcelerometr, żyroskop, magnetometr). Terasic K0161
Brak towaru
Zestaw startowy FPGA wyposażony w Cyclone V GT z 301K LE oraz minikomputer z układem Intel Celeron Dual Core (64 GB eMMC, 4 GB RAM). Moduł FPGA posiada 1 GB pamięci DDR3, 64 MB pamięci SDRAM, interfejs UART-USB oraz rozszerzenia, takie jak GPIO i Arduino. Terasic P0650
Brak towaru
Terasic Spider to sześcionożny robot kroczący z 18 serwomechanizmami sterowanymi przez płytkę Altera DE0-Nano-SoC łączącą układ FPGA oraz procesor ARM Cortex-A9. Zestaw zawiera złożonego robota oraz liczne akcesoria. P0425