113,29 zł Netto
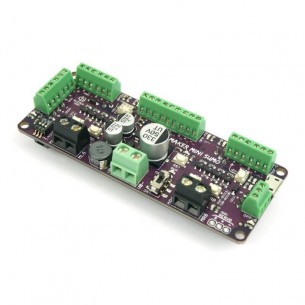
Sterownik dedykowany do robotów klasy Sumo. Ma wbudowany mikrokontroler ATmega328 i jest komaptybilny ze środowiskiem Arduino IDE. Cytron URC10
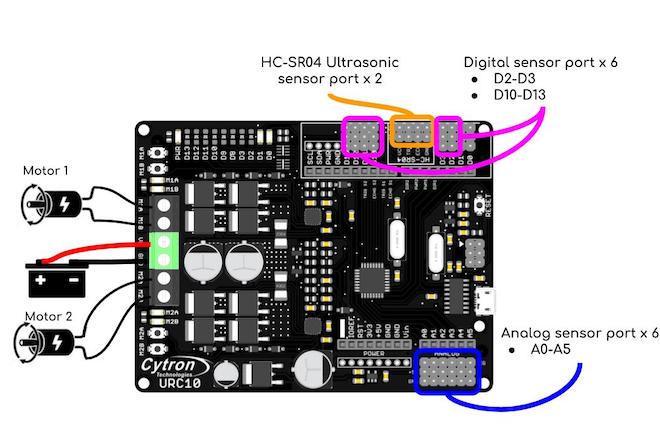
Sterownik dedykowany do robotów klasy Sumo. Ma wbudowany mikrokontroler ATmega328 i jest kompatybilny z Arduino IDE. Może być znakomitym rozwiązaniem dla osób początkujących, które chciałby rozpocząć zabawę z robotami sumo, ale nie potrafią jeszcze same w pełni zaprojektować elektroniki sterującej. Moduł może zasilać dwa silniki prądu stałego o poborze prądu do 10 A (prąd ciągły). Użytkownik ma możliwość podłączenia licznych czujników niezbędnych w walkach robotów, w tym czujników przeciwnika, krawędzi, ale także modułu startowego. Na płytce umieszczono przyciski pozwalające w łatwy sposób przetestować działanie napędów. Moduł zasilany jest napięciem z zakresu od 8 do 25 V i ma wbudowane stabilizatory napiecia 5 V i 3,3 V. Sterownik nie wymaga lutowania, a wszystkie elementy podłaczane są przez złącza śrubowe lib listy goldpin. Biblioteka wraz z opisem konfiguracji dostępne są w repozytorium GitHub projektu.
Dedykowany dla robotów sumo o wadze do 3 kg
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Dwukanałowy sterownik silników prądu stałego (DC) o napięciu pracy od 5 do 30 V i maksymalnym prądzie ciągłym do 10 A. Może być sterowany sygnałem PWM lub za pomocą wbudowanych przycisków. Cytron MDD10A
Shield z dwukanałowym sterownikiem silników DC dla Arduino. Ma napięcie pracy od 7 do 30 V i prąd ciągły do 10 A. Może być sterowany sygnałem PWM lub za pomocą wbudowanych przycisków. Cytron SHIELD-MDD10
Dwukanałowy sterownik silników prądu stałego (DC) o napięciu pracy od 7 do 30 V i maksymalnym prądzie ciągłym do 10 A. Może być sterowany sygnałem PWM lub za pomocą przycisków. Cytron MDDRC10
Sterownik dedykowany do robotów klasy Mini Sumo. Jest kompatybilny z płytkami Arduino Uno i Arduino Nano. Cytron MAKER-MSUMO
Zestaw do budowy pojazdu napędzanego silnikiem prądu stałego ze śmigłem. Konstrukcja czterokołowa, zasilana dwoma bateriami AA 1,5 V
Brak towaru
Zestaw do budowy chodzącego dinozaura T-Rex. Konstrukcja oparta na elementach drewnianych, napędzana jest silnikiem DC zasilanym dwoma bateriami AA 1,5 V
Zestaw ze stołem sterowanym hydraulicznie przy pomocy strzykawek. Wykonany z drewna i tworzywa stucznego, pozwala dzieciom zapoznać się z zasadami działania podnośników hydraulicznych
Brak towaru
Zdalnie sterowany samochód wyścigowy w formie zestawu do samodzielnego montażu
Brak towaru
Sejf w formie zestawu do samodzielnego montażu. Konstrukcja wykonana została z drewna. Ma wbudowane zamknięcie z 3-cyfrowym mechanizmem kodowym
Brak towaru
Elektroniczny robak w formie zestawu do samodzielnego montażu. Napędzany jest silnikiem prądu stałego i zasilany zestawem dwóch baterii AA
Brak towaru
Elektroniczna wyrzutnia do piłek w formie zestawu do samodzielnego montażu. Urządzenie zasilane jest dwiema bateriami AA
Elektroniczny robot wspinaczkowy w formie zestawu do samodzielnego montażu. Urządzenie zasilane jest dwoma bateriami AA
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino. Wersja zmontowana. Pololu 3737
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino. Wersja zmontowana. Pololu 3738
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino. Wersja zmontowana. Pololu 3736
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino. Wersja do montażu. Pololu 3740
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino. Wersja do montażu. Pololu 3741
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino. Wersja do montażu. Pololu 3739
Brak towaru
Kontroler przeznaczony do robota Pololu 3pi+ 32U4. Został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino. Pololu 3735
Brak towaru
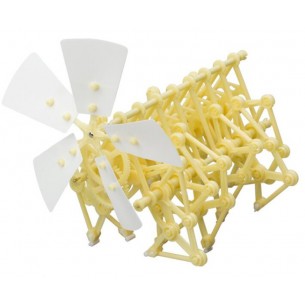
Robot kroczący napędzany siłą wiatru. Znakomita zabawka dla najmłodszych
Sterownik dedykowany do robotów klasy Sumo. Ma wbudowany mikrokontroler ATmega328 i jest komaptybilny ze środowiskiem Arduino IDE. Cytron URC10