- Obecnie brak na stanie
")


")
 - widok od góry")
 - widok od spodu")
 - widok od przodu")
 - widok od tyłu")
 - widok od boku")

Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 50:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 3125
Robot klasy minisumo od Pololu oparty na podwoziu gąsienicowym. Wymiary (ok. 100 mm x 100 mm) oraz waga (ok. 300 g z bateriami) pozwalają na użycie robota jako platformy minisumo w popularnych zawodach dla uczniów i studentów organizowanych na całym świecie.
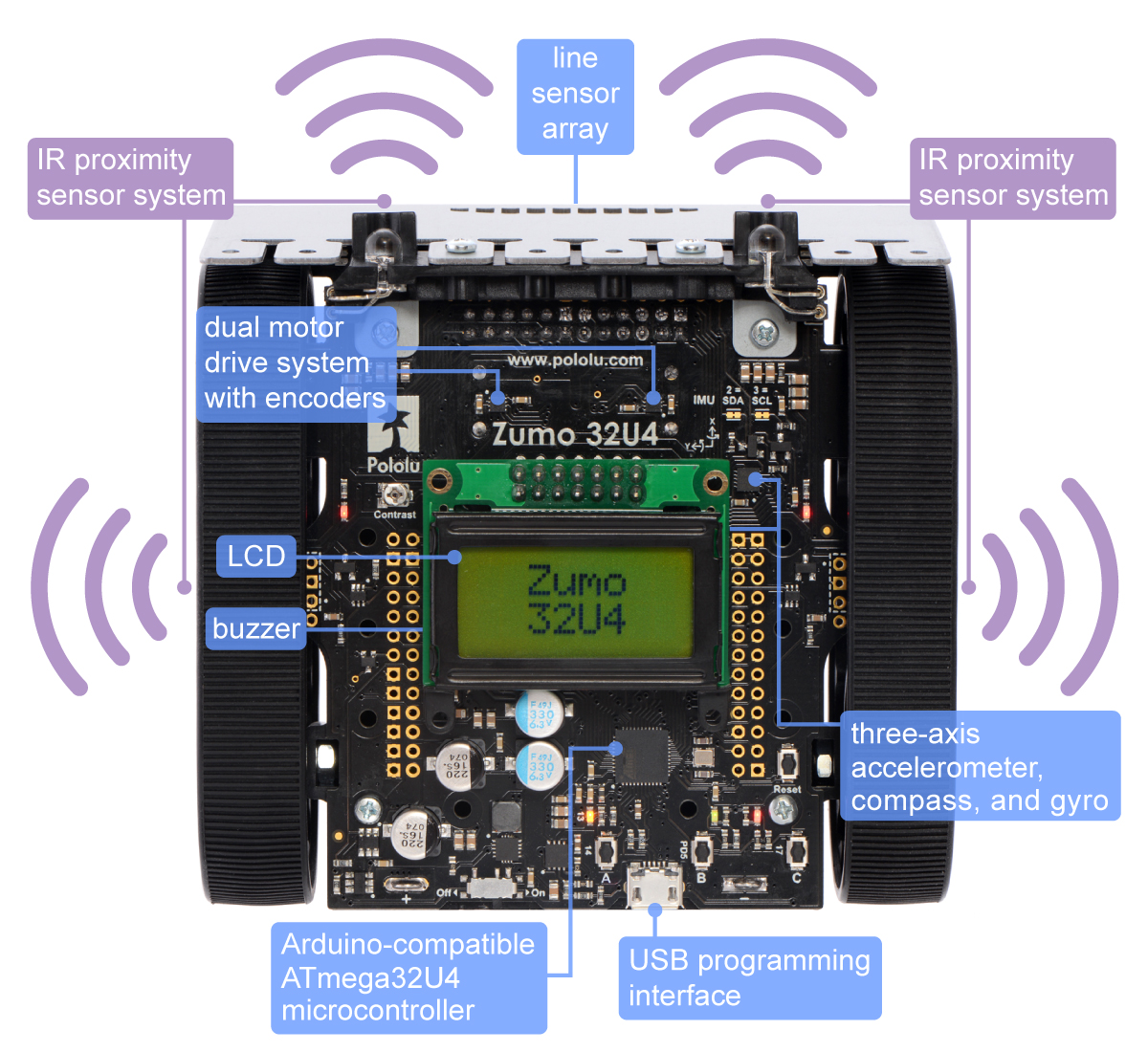
Zumo 32U4 to robot oparty na MCU ATmega32U4 kompatybilnym z Arduino. Wyposażony jest w dwa sterowniki silników i szereg zintegrowanych czujników, w tym parę enkoderów kwadraturowych do sterowania silnikiem w pętli zamkniętej, kompletną jednostkę pomiaru bezwładnościowego (3-osiowy akcelerometr, żyroskop i magnetometr), pięć czujników odbiciowych do wykrywania linii lub krawędzi oraz czujniki zbliżeniowe skierowane do przodu i na bok do wykrywania przeszkód i określania odległości od przeszkody. Trzy przyciski oferują wygodny interfejs do wprowadzania danych przez użytkownika, a wyświetlacz LCD, brzęczyk i diody LED sygnalizują operatorowi informacje zwrotne. Robot wyposażony jest w dwa silniki Pololu 50:1 HP z metalową przekładnią.
Uwaga!
Zestaw nie zawiera czterech baterii AA niezbędnych do uruchomienia robota. Należy je zakupić oddzielnie.Robot opaty jest mikrokontroler Atmega 32u4, z wgranym bootloaderem zgodnym z Arduino Leonardo. Dzięki temu w procesie programowania robota nie jest wymagany dodatkowy programator, a robot może być programowany bezpośrednio poprzez złącze USB.
Dostępny jest szereg bibliotek Arduino, do wszystkich układów i czujników znajdujących się w robocie.
Robot dostępny jest również w wersji z silnikami z przekładnią 75:1, 100:1 oraz jako zestaw do samodzielnego montażu.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Niewielki silnik dużej mocy z metalową przekładnią 50:1, napięciem pracy 6 V, poborem prądu od 0,07 A do 1,6 A, prędkością 590 RPM, maksymalnym momentem obrotowym 0,86 kg*cm i obustronnym wałem. Pololu 2213
Zestaw do budowy podwozia gąsienicowego do robota minisumo Pololu Zumo. Zestaw nie zawiera silników, baterii ani elementów elektronicznych. Pololu 1418
Zestaw do budowy robota minisumo na podwoziu gąsienicowym. W zestawie jest spychacz, płytka sterująca i zestaw gąsienic. Robot w wersji do samodzielnego montażu, wymaga dodatkowo silników i czterech baterii AA. Pololu 4990
Brak towaru
Kabel sieciowy Ethernet Patchcord UTP 5E o długości 5 m - niebieski, ze złączami 2xRJ45
Brak towaru
Kabel sieciowy Ethernet Patchcord UTP 5E o długości 5 m - szary, ze złączami 2xRJ45
Brak towaru
Płytka daje możliwość znacznego poszerzenia funkcjonalności zestawu uruchomieniowego STM32F407G-DISC1. Na płytce znajduje się m.in. gniazdo karty pamięci (microSD), gniazdo Ethernet oraz złącza, za pomocą których można dołączyć do płytki moduły serii SMT32F4DIS
Brak towaru
Płytka kamery dla zestawu STM32F407G-DISC1. Pozwala na przechwytywanie obrazu z rozdzielczością 1280 x 1024 pikseli (1,3MP). W zestawie znajduje się przewód elastyczny, pozwalający na dołączenie kamery do płytki rozszerzającej STM32F4DIS-BB
Brak towaru
MyoWare Cable Shield jest modułem przystosowanym do połączenia z modułem MyoWare Muscle Sensor, Cable Shield wyposażony jest w gniazdo jack, do którego można dołączyć elektrody z przewodami, co pozwala na pomiar na odległość. DEV-13687
Brak towaru
Zestaw elementów do nauki IoT bez konieczności lutowania i programowania. Sparkfun KIT-14682
Brak towaru
Programator Pololu USB AVR v2. Umożliwia programowanie mikrokontrolerów AVR. Programator zawiera interfejs szeregowy w standardzie TTL umożliwiający debugowanie oraz programowanie z użyciem bootloadera. Pololu 3170
Brak towaru
Zasilacz/ładowarka samochodowa eXtreme CC312U 3100mA z dwoma gniazdami USB, umożliwia ładowanie telefonów, nawigacji, odtwarzaczy mp3/mp4 oraz podłączenie komputerów Raspberry Pi
Brak towaru
Zestaw AVT do samodzielnego montażu niezwykle efektownego zegara bombowego. AVT3128 B
Brak towaru
Zestaw AVT do samodzielnego montażu miernika pojemności akumulatorów i pozimu zużycia baterii. AVT5500 B
Brak towaru
Moduł Waveshare CC1101 RF Board umożliwia komunikację radiową w paśmie 433 MHz, moduł oparty jest na układzie CC1101. Komunikacja z układem CC1101 możliwa jest z wykorzystaniem interfejsu SPI. Moduł pracuje z zasilaniem o napięciu 1,9..3,6 V, wyposażony jest w złącze o rastrze 1,27 mm
Brak towaru
Moduł firmy Waveshare z 3-osiowym cyfrowym akcelerometrem/magnetometrem LSM303DLHC. Moduł wyposażony jest w dwa złącza I2C, dzięki czemu możłiwe jest łatwe dołączenie go do rozbudowanych magistral I2C
Brak towaru
Moduł z 3-osiowym żyroskopem L3G4200D, komunikacja przez SPI oraz I2C (złącze I2C zostało zdublowane, co ułatwia łączenie kilku modułów)
Brak towaru
Niewielki silnik Pololu z plastikową przekładnią 120:1, zalecanym napięciem pracy 4,5 V, prędkością 150 rpm i momentem obrotowym 1,8 kg*cm (25 oz-in) oraz wałem w kształcie litery D ustawionym pod kątem 90° względem osi silnika. Pololu 1511
Brak towaru
Niewielki silnik Pololu z plastikową przekładnią 120:1, napięciem pracy 4,5 V, prędkością 150 rpm i momentem obrotowym 1,8 kg*cm (25 oz-in) oraz wałem w kształcie litery D. Pololu 1512
Brak towaru
Niewielki silnik Pololu z plastikową przekładnią 120:1, napięciem pracy 4,5 V, prędkością 120 rpm i momentem obrotowym 1,4 kg*cm (20 oz-in), D-kształtnym wałem pod kątem 90° względem obustronnych osi silnika. Pololu 1515
Brak towaru
Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 50:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 3125