91,43 zł Netto
Moduł z 13 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4453
Czujnik obiciowy składający się z szeregu 13 transoptorów typu QTRX z możliwością sterowania indywidualnie jasnością każdego z podczerwonych LED-ów. Sensory na płytce są średnio zagęszczone (MD), a odległość między nimi wynosi 8mm. Moduł może być zasilany napięciem z zakresu od 2,9 V do 5,5 V i niezależnie od napięcia zasilania pobiera prąd do 31 mA. Optymalna odległość czujnika od podłoża to 10 mm, a maksymalna odległość wynosi 40 mm. Moduł idealnie nadaje się do wykrywania zmian w odbiciu światła, dzięki czemu może być stosowany do wykrywania krawędzi podłoża lub do śledzenia linii w robotach typu linefollower.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Moduł z mikrokontrolerem ATMega4809 z rodziny AVR (48 kB Flash, 6 kB SRAM, 256 B EEPROM). Moduł ma dwa 15-pinowe złącza wyposażone w GPIO, SPI, I2C, PWM, USART, DAC i ADC. Arduino ABX00028
Brak towaru
Dwukanałowy sterownik silników DC zasilany napięciem od 2,5 do 9,5V o maksymalnym prądzie ciągłym 1A na kanał. Posiada wbudowany regulator napięcia. Cytron Maker Drive
Aluminiowa platforma do budowy robota mobilnego. W płycie wykonano liczne otwory ułatwiające montaż silników i elektroniki. Zestaw wyposażony w 4 silniki TT oraz 4 koła wielokierunkowe Mecanum o średnicy 60 mm
Brak towaru
Odbiciowy czujnik z wyjściem cyfrowym, umożliwiający wykrywanie przeszkód, z regulowanym progiem wyzwalania za pomocą wbudowanego potencjometru. Moduł może być podłączony bezpośrednio do mikrokontrolera oraz zestawów deweloperskich takich jak Arduino, Raspberry Pi, STM32 czy ESP32
Brak towaru
Moduł czujnika podczerwieni, do wykrywania obiektów w bliskim otoczeniu lub wykrywania linii w robocie typu "Line Follower", zgodny z RoHS
Brak towaru
Niewielki moduł z czujnikiem odbiciowym QRE1113GR. Czujnik zbudowany jest z diody LED IR oraz fototranzystora IR. Z jego pomocą możliwe jest określenie jasności położenia, nad którym się znajduje, może być wykorzystywany np. do wykrywania czarnej linii w robotach typu Linefollower. SparkFun ROB-09453
Brak towaru
Niewielki moduł z czujnikiem odbiciowym QRE1113GR. Czujnik zbudowany jest z diody LED IR oraz fototranzystora IR. Z jego pomocą możliwe jest określenie jasności położenia, nad którym się znajduje, może być wykorzystywany np. do wykrywania czarnej linii w robotach typu Linefollower. SparkFun ROB-09454
Brak towaru
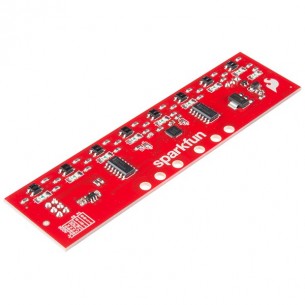
Moduł matrycy sześciu czujników odbiciowych przeznaczony do robota Zumo. Moduł umożliwia dodanie w łatwy sposób wykrywania linii lub wykrywania krawędzi do robota. Pololu 1419
QTR-1A Reflectance Sensor (2-Pack)
QTR-1RC Reflectance Sensor (2-Pack)
Brak towaru
Matryca QTR-3A umożliwia precyzyjny analogowy pomiar odbicia podłoża w kompaktowej formie. Matryca sprawdza się w robotach śledzących linię i systemach detekcji kontrastu, oferując niezależne kanały pomiarowe oraz łatwą integrację z mikrokontrolerami wyposażonymi w przetworniki ADC. Pololu 2456
Brak towaru
Czujnik line follower dla robotów RedBot z sensorem QRE1113GR z 3-pinowym złączem, zasilanie 5V, pobór prądu 25mA. SEN-11769
Brak towaru
Czujnik odbiciowy pozwala na "śledzenie linii", co jest podstawą działania robotów takich, jak na przykład Line Follower; może także posłużyć do wykrywania krawędzi. DFRobot SEN0017
Moduł z ośmioma czujnikami QRE1113 przeznaczony do budowy robotów line follower. Moduł komunikuje się przez interfejs I2C, zasilany jest napięciem 5V, jest wyposażony w diody LED sygnalizujące odczyty sensorów oraz regulację jasności IR. SEN-13582
Brak towaru
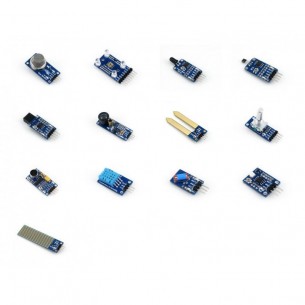
W komplecie: czujnik gazu, czujnik koloru, czujnik płomieni, czujnik Halla, czujnik odbiciowy podczerwieni, laserowy czujnik odległości, laserowy czujnik wilgotności gleby, enkoder, czujnik dźwięku, czujnik temperatury i wilgotności, czujnik wychylenia, czujnik UV oraz czujnik poziomu cieczy. Moduły są kompatybilne z Arduino
Czujnik odbiciowy IR (podczerwień) firmy Waveshare pozwala na śledzenie linii, co jest podstawą działania robotów line follower, może także posłużyć do wykrywania krawędzi. Czujnik ma wyjście analogowe i cyfrowe, czułość czujnika jest regulowana. Waveshare Infrared Reflective Sensor
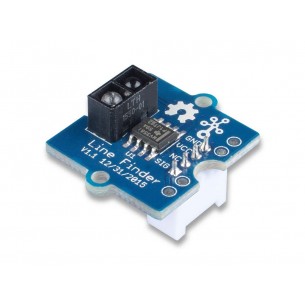
Moduł z czujnikiem odbiciowym (czujnikiem linii) RS-06WD. Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs cyfrowy. Seeed Studio 101020172
Moduł z 13 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4453