806,88 zł Netto
Robot kroczący Waveshare 32189 w wersji WAVEGO Pro BASIC z 12 stopniami swobody, wyposażony w serwomechanizmy magistrali szeregowej z informacją zwrotną oraz 9-osiowy czujnik IMU ICM20948, oparty na sterowniku ESP32-D0WDQ6-V3. Konstrukcja umożliwia realizację kinematyki odwrotnej, stabilizację postawy oraz sterowanie bezprzewodowe przez interfejs webowy z funkcją zapisu i odtwarzania sekwencji ruchów (JSON), przeznaczona do zastosowań edukacyjnych, badawczych i projektów robotyki mobilnej. Waveshare WAVEGO Pro (EU)
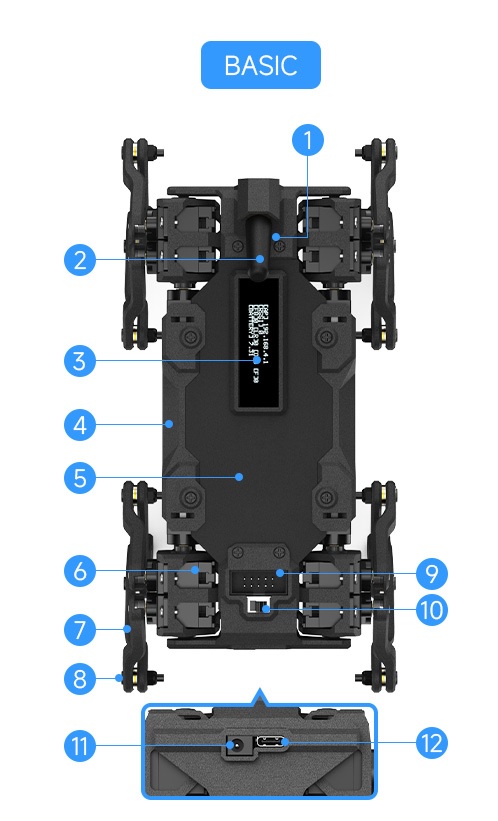
WAVEGO Pro BASIC obejmuje czteronożnego robota kroczącego inspirowanego ruchem zwierząt, przeznaczonego do nauki robotyki, programowania oraz realizacji projektów mobilnych, a także zestaw akcesoriów i elementy niezbędne do uruchomienia platformy, w tym zasilacz 8.4 V 2 A (EU) oraz opakowanie.
Konstrukcja umożliwia implementację algorytmów sterowania ruchem oraz analizę zachowania układów wieloczłonowych w czasie rzeczywistym. Architektura oparta na sterowniku ESP32 pozwala na przetwarzanie danych oraz realizację zadań sterujących bez konieczności stosowania dodatkowego komputera nadrzędnego, co upraszcza wdrażanie i testowanie aplikacji.

Konstrukcja z 12 stopniami swobody wykorzystuje wieloczłonowe mechanizmy nóg, które w połączeniu z algorytmami kinematyki odwrotnej umożliwiają precyzyjne sterowanie pozycją kończyn. Takie rozwiązanie pozwala na generowanie płynnych trajektorii ruchu oraz zwiększa efektywność przenoszenia momentu obrotowego serwomechanizmów. Robot może realizować różne tryby chodu oraz dynamiczne zmiany pozycji.
Zastosowanie serwomechanizmów magistrali szeregowej umożliwia przekazywanie informacji zwrotnej dotyczącej parametrów pracy, takich jak pozycja czy prędkość, co pozwala na dokładniejsze sterowanie ruchem i jego powtarzalność. Architektura układu napędowego umożliwia synchronizację pracy wszystkich osi, co ma znaczenie przy realizacji złożonych sekwencji ruchowych.
Budowa mechaniczna nóg pozwala na równomierne rozłożenie obciążeń podczas kontaktu z podłożem, co poprawia stabilność ruchu oraz ogranicza przeciążenia poszczególnych elementów napędowych. Rozwiązanie sprawdza się w zastosowaniach wymagających precyzyjnego odwzorowania ruchu oraz testowania algorytmów sterowania dla robotów kroczących.
Zastosowanie 9-osiowego czujnika ICM20948 umożliwia bieżące monitorowanie orientacji robota. Dane z akcelerometru, żyroskopu i magnetometru wykorzystywane są do stabilizacji postawy oraz kompensacji odchyleń podczas ruchu. Pozwala to na utrzymanie równowagi oraz dostosowanie pracy robota do zmiennych warunków podłoża.
Układ pomiarowy umożliwia szybką reakcję na zmiany położenia, co poprawia kontrolę nad ruchem oraz ogranicza ryzyko utraty stabilności podczas wykonywania sekwencji ruchowych.


Sterowanie odbywa się za pomocą interfejsu webowego dostępnego przez przeglądarkę, z wykorzystaniem automatycznie tworzonego punktu dostępowego WiFi. Rozwiązanie nie wymaga instalacji dodatkowego oprogramowania ani konfiguracji środowiska. System umożliwia zapis poleceń w formacie JSON jako plików zadań w pamięci ESP32, co pozwala na odtwarzanie zaprogramowanych sekwencji ruchów oraz realizację powtarzalnych operacji.
Interfejs sterujący umożliwia zarządzanie podstawowymi funkcjami robota w czasie rzeczywistym, w tym zmianą trybów ruchu oraz inicjowaniem wcześniej zapisanych sekwencji. Komunikacja bezprzewodowa pozwala na pracę w środowisku bez bezpośredniego połączenia przewodowego, co zwiększa elastyczność zastosowań.
Zapisane sekwencje mogą być wykorzystywane do testowania algorytmów sterowania oraz powtarzalnych scenariuszy pracy, co znajduje zastosowanie w środowiskach edukacyjnych i podczas prototypowania systemów robotycznych.
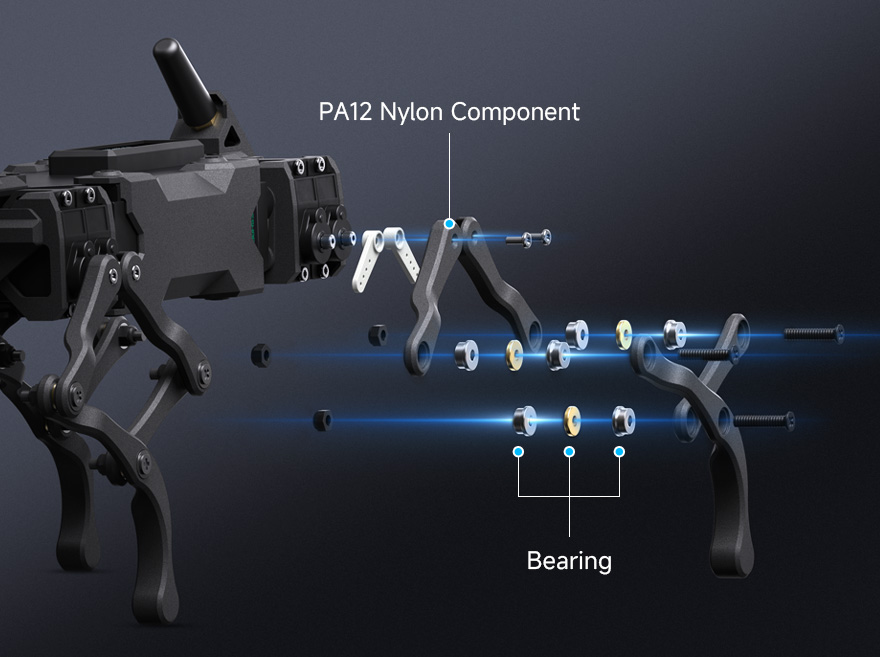
Korpus wykonany z aluminium 5052 oraz tworzywa PA12 zapewnia wysoką wytrzymałość mechaniczną przy zachowaniu stosunkowo niskiej masy. Zastosowanie licznych połączeń łożyskowych w przegubach poprawia trwałość oraz płynność pracy mechanizmów. Kompaktowa budowa umożliwia pracę robota w ograniczonej przestrzeni roboczej.
Konstrukcja została zaprojektowana z uwzględnieniem łatwego dostępu do elementów mechanicznych i elektronicznych, co ułatwia serwisowanie oraz modyfikacje w trakcie prac rozwojowych. Zastosowane materiały ograniczają odkształcenia podczas pracy pod obciążeniem, co wpływa na stabilność parametrów ruchu.
Układ nośny zapewnia odpowiednią sztywność całej struktury przy zachowaniu mobilności, co ma znaczenie przy realizacji dynamicznych sekwencji ruchowych oraz pracy w różnych konfiguracjach roboczych.
Robot znajduje zastosowanie w edukacji, badaniach oraz prototypowaniu systemów mobilnych, gdzie istotne pozostają analiza ruchu, implementacja algorytmów sterowania oraz integracja systemów wbudowanych. Konstrukcja umożliwia prowadzenie eksperymentów z zakresu kinematyki, sterowania oraz komunikacji bezprzewodowej, a także testowanie rozwiązań wykorzystywanych w robotach autonomicznych i systemach mechatronicznych.
Element:
Element:
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Robot kroczący Waveshare 32193 w wersji WAVEGO Pro PI5 KIT z 12 stopniami swobody, wyposażony w serwomechanizmy magistrali szeregowej z informacją zwrotną, 9-osiowy czujnik IMU ICM20948, kamerę 5MP 160° oraz wbudowany Raspberry Pi 5 jako kontroler nadrzędny. Konstrukcja umożliwia realizację kinematyki odwrotnej, stabilizację postawy, przetwarzanie obrazu oraz sterowanie bezprzewodowe przez interfejs webowy z funkcją zapisu i odtwarzania sekwencji ruchów (JSON), przeznaczona do zastosowań edukacyjnych, badawczych i projektów robotyki mobilnej. Waveshare PI5 WAVEGO Pro KIT (EU)
Brak towaru
Robot kroczący Waveshare 32191 w wersji WAVEGO Pro EX z 12 stopniami swobody, wyposażony w serwomechanizmy magistrali szeregowej z informacją zwrotną, 9-osiowy czujnik IMU ICM20948, kamerę 5MP 160° oraz możliwość współpracy z Raspberry Pi jako kontrolerem nadrzędnym. Konstrukcja umożliwia realizację kinematyki odwrotnej, stabilizację postawy, przetwarzanie obrazu oraz sterowanie bezprzewodowe przez interfejs webowy z funkcją zapisu i odtwarzania sekwencji ruchów (JSON), przeznaczona do zastosowań edukacyjnych, badawczych i projektów robotyki mobilnej. Waveshare RPI WAVEGO Pro ACCE (EU)
Brak towaru
Robot kroczący Waveshare 32193 w wersji WAVEGO Pro PI5 KIT z 12 stopniami swobody, wyposażony w serwomechanizmy magistrali szeregowej z informacją zwrotną, 9-osiowy czujnik IMU ICM20948, kamerę 5MP 160° oraz wbudowany Raspberry Pi 5 jako kontroler nadrzędny. Konstrukcja umożliwia realizację kinematyki odwrotnej, stabilizację postawy, przetwarzanie obrazu oraz sterowanie bezprzewodowe przez interfejs webowy z funkcją zapisu i odtwarzania sekwencji ruchów (JSON), przeznaczona do zastosowań edukacyjnych, badawczych i projektów robotyki mobilnej. Waveshare PI5 WAVEGO Pro KIT (EU)
Brak towaru
Robot kroczący Waveshare 32191 w wersji WAVEGO Pro EX z 12 stopniami swobody, wyposażony w serwomechanizmy magistrali szeregowej z informacją zwrotną, 9-osiowy czujnik IMU ICM20948, kamerę 5MP 160° oraz możliwość współpracy z Raspberry Pi jako kontrolerem nadrzędnym. Konstrukcja umożliwia realizację kinematyki odwrotnej, stabilizację postawy, przetwarzanie obrazu oraz sterowanie bezprzewodowe przez interfejs webowy z funkcją zapisu i odtwarzania sekwencji ruchów (JSON), przeznaczona do zastosowań edukacyjnych, badawczych i projektów robotyki mobilnej. Waveshare RPI WAVEGO Pro ACCE (EU)
Brak towaru
Robot kroczący Waveshare 32189 w wersji WAVEGO Pro BASIC z 12 stopniami swobody, wyposażony w serwomechanizmy magistrali szeregowej z informacją zwrotną oraz 9-osiowy czujnik IMU ICM20948, oparty na sterowniku ESP32-D0WDQ6-V3. Konstrukcja umożliwia realizację kinematyki odwrotnej, stabilizację postawy oraz sterowanie bezprzewodowe przez interfejs webowy z funkcją zapisu i odtwarzania sekwencji ruchów (JSON), przeznaczona do zastosowań edukacyjnych, badawczych i projektów robotyki mobilnej. Waveshare WAVEGO Pro (EU)
Brak towaru
Zaawansowany robot sześcionożny (hexapod) o 18 stopniach swobody oparty na mikrokontrolerze ESP32-WROOM-32. Konstrukcja wykorzystuje serwomechanizmy magistrali o momencie 30kg.cm, czujnik IMU ICM20948 oraz sterowanie ruchem wektorowym i funkcję samobalansowania. Platforma open source umożliwia rozbudowę o Raspberry Pi oraz rozwój własnych algorytmów sterowania. Waveshare HexArth (EU)
Brak towaru
Edukacyjny zestaw do budowy humanoidalnego robota wyposażonego w 17 serwomechanizmów magistralowych, umożliwiających wykonywanie złożonych ruchów takich jak chodzenie czy gesty. Platforma wykorzystuje mikrokontroler Seeed Studio XIAO ESP32S3 z łącznością Wi-Fi i Bluetooth LE, co pozwala na integrację z projektami IoT oraz zdalne sterowanie. System oferuje webowy edytor ruchu umożliwiający wizualne programowanie pozycji serw i zapisywanie sekwencji w formacie JSON. Otwarta konstrukcja oraz komunikacja UART pozwalają na współpracę z platformami takimi jak Raspberry Pi, Arduino, ESP32 czy STM32. Seeed Studio 100092737
Brak towaru
Humanoidalna platforma robotyczna o 10 stopniach swobody przeznaczona do nauki robotyki, sterowania ruchem oraz programowania systemów wbudowanych. Robot wykorzystuje 10 magistralowych serwomechanizmów Fashionstar RA8-U25H-M oraz mikrokontroler XIAO ESP32S3 z łącznością Wi-Fi i Bluetooth LE. System umożliwia bezprzewodowe sterowanie, programowanie sekwencji ruchów oraz współpracę z platformami takimi jak Raspberry Pi, Arduino, STM32 czy ESP32 przez interfejs UART. Otwarta konstrukcja oparta na elementach drukowanych 3D oraz dostępny w przeglądarce wizualny edytor ruchu ułatwiają tworzenie i modyfikowanie animacji robota. Seeed Studio 100064698
Brak towaru
Platforma edukacyjna łącząca cechy robota dwunożnego i pojazdu kołowego, umożliwiająca naukę robotyki, sterowania ruchem i algorytmów stabilizacji. Robot wykorzystuje bezszczotkowe silniki gimbal 2208 sterowane z użyciem technologii FOC, co zapewnia precyzyjne sterowanie momentem obrotowym, prędkością i pozycją. Konstrukcja oparta na modelu kinematyki całego ciała oraz adaptacyjnym algorytmie stabilizacji pozwala na dynamiczne balansowanie i poruszanie się po nierównym terenie. Seeed Studio 100090157
Brak towaru
Robot kroczący Waveshare 32189 w wersji WAVEGO Pro BASIC z 12 stopniami swobody, wyposażony w serwomechanizmy magistrali szeregowej z informacją zwrotną oraz 9-osiowy czujnik IMU ICM20948, oparty na sterowniku ESP32-D0WDQ6-V3. Konstrukcja umożliwia realizację kinematyki odwrotnej, stabilizację postawy oraz sterowanie bezprzewodowe przez interfejs webowy z funkcją zapisu i odtwarzania sekwencji ruchów (JSON), przeznaczona do zastosowań edukacyjnych, badawczych i projektów robotyki mobilnej. Waveshare WAVEGO Pro (EU)