











1 539,23 zł Netto
Platforma edukacyjna łącząca cechy robota dwunożnego i pojazdu kołowego, umożliwiająca naukę robotyki, sterowania ruchem i algorytmów stabilizacji. Robot wykorzystuje bezszczotkowe silniki gimbal 2208 sterowane z użyciem technologii FOC, co zapewnia precyzyjne sterowanie momentem obrotowym, prędkością i pozycją. Konstrukcja oparta na modelu kinematyki całego ciała oraz adaptacyjnym algorytmie stabilizacji pozwala na dynamiczne balansowanie i poruszanie się po nierównym terenie. Seeed Studio 100090157
StackForce Mini Wheeled-Legged Robot to kompaktowy, dwunożny robot kołowo-kroczący zaprojektowany jako platforma edukacyjna i badawcza do nauki robotyki, sterowania ruchem oraz algorytmów stabilizacji. Konstrukcja robota łączy cechy robota dwunożnego i pojazdu kołowego, umożliwiając dynamiczne balansowanie, szybkie przemieszczanie się oraz stabilną jazdę na różnych powierzchniach. Dzięki zastosowaniu zaawansowanego modelu kinematyki całego ciała oraz adaptacyjnego algorytmu stabilizacji robot potrafi utrzymywać równowagę nawet na nierównym terenie oraz wykonywać złożone ruchy. Robot wyposażony jest w silniki bezszczotkowe typu gimbal 2208 sterowane przez kontroler wykorzystujący technologię FOC (Field-Oriented Control). Pozwala to na precyzyjne sterowanie prędkością, pozycją oraz momentem obrotowym zarówno w trybie otwartej, jak i zamkniętej pętli regulacji. Takie rozwiązanie zapewnia płynny ruch oraz wysoką stabilność podczas jazdy i manewrowania.

Sercem platformy jest kontroler oparty na mikrokontrolerze ESP32, który oferuje dużą wydajność obliczeniową oraz szeroki zestaw interfejsów komunikacyjnych, takich jak I2C, SPI, PWM i inne. Dzięki temu robot może być łatwo rozszerzany o dodatkowe czujniki i moduły, co czyni go elastyczną platformą do eksperymentów oraz rozwoju nowych funkcji. Robot obsługuje wiele metod sterowania, w tym zdalne sterowanie przez Wi-Fi, kontroler Bluetooth, port szeregowy oraz klasyczny nadajnik RC. Użytkownik może programować zachowanie robota oraz modyfikować jego algorytmy sterowania zgodnie z własnymi potrzebami. Wbudowany wysokiej precyzji enkoder magnetyczny MT6701 pozwala na dokładny pomiar pozycji silników, co przekłada się na stabilne sterowanie ruchem.
Platforma została zaprojektowana jako projekt open-source, co oznacza, że zarówno kod źródłowy, jak i pliki projektowe są dostępne dla użytkowników. Dzięki temu możliwe jest prowadzenie własnych badań, modyfikowanie konstrukcji oraz rozwijanie nowych funkcji robota. Zestaw zawiera również szczegółową dokumentację, przykładowe programy oraz materiały szkoleniowe w postaci kursów wideo. Dzięki temu robot może być wykorzystywany zarówno przez początkujących entuzjastów robotyki, jak i przez bardziej zaawansowanych użytkowników pracujących nad algorytmami sterowania, stabilizacji czy systemami autonomicznymi.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
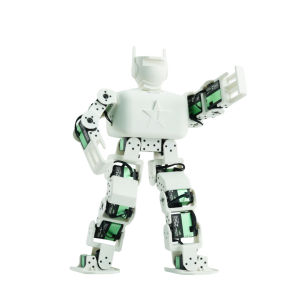
Edukacyjny zestaw do budowy humanoidalnego robota wyposażonego w 17 serwomechanizmów magistralowych, umożliwiających wykonywanie złożonych ruchów takich jak chodzenie czy gesty. Platforma wykorzystuje mikrokontroler Seeed Studio XIAO ESP32S3 z łącznością Wi-Fi i Bluetooth LE, co pozwala na integrację z projektami IoT oraz zdalne sterowanie. System oferuje webowy edytor ruchu umożliwiający wizualne programowanie pozycji serw i zapisywanie sekwencji w formacie JSON. Otwarta konstrukcja oraz komunikacja UART pozwalają na współpracę z platformami takimi jak Raspberry Pi, Arduino, ESP32 czy STM32. Seeed Studio 100092737
Brak towaru
Humanoidalna platforma robotyczna o 10 stopniach swobody przeznaczona do nauki robotyki, sterowania ruchem oraz programowania systemów wbudowanych. Robot wykorzystuje 10 magistralowych serwomechanizmów Fashionstar RA8-U25H-M oraz mikrokontroler XIAO ESP32S3 z łącznością Wi-Fi i Bluetooth LE. System umożliwia bezprzewodowe sterowanie, programowanie sekwencji ruchów oraz współpracę z platformami takimi jak Raspberry Pi, Arduino, STM32 czy ESP32 przez interfejs UART. Otwarta konstrukcja oparta na elementach drukowanych 3D oraz dostępny w przeglądarce wizualny edytor ruchu ułatwiają tworzenie i modyfikowanie animacji robota. Seeed Studio 100064698
Brak towaru
Robot kroczący Waveshare 32193 w wersji WAVEGO Pro PI5 KIT z 12 stopniami swobody, wyposażony w serwomechanizmy magistrali szeregowej z informacją zwrotną, 9-osiowy czujnik IMU ICM20948, kamerę 5MP 160° oraz wbudowany Raspberry Pi 5 jako kontroler nadrzędny. Konstrukcja umożliwia realizację kinematyki odwrotnej, stabilizację postawy, przetwarzanie obrazu oraz sterowanie bezprzewodowe przez interfejs webowy z funkcją zapisu i odtwarzania sekwencji ruchów (JSON), przeznaczona do zastosowań edukacyjnych, badawczych i projektów robotyki mobilnej. Waveshare PI5 WAVEGO Pro KIT (EU)
Brak towaru
Robot kroczący Waveshare 32191 w wersji WAVEGO Pro EX z 12 stopniami swobody, wyposażony w serwomechanizmy magistrali szeregowej z informacją zwrotną, 9-osiowy czujnik IMU ICM20948, kamerę 5MP 160° oraz możliwość współpracy z Raspberry Pi jako kontrolerem nadrzędnym. Konstrukcja umożliwia realizację kinematyki odwrotnej, stabilizację postawy, przetwarzanie obrazu oraz sterowanie bezprzewodowe przez interfejs webowy z funkcją zapisu i odtwarzania sekwencji ruchów (JSON), przeznaczona do zastosowań edukacyjnych, badawczych i projektów robotyki mobilnej. Waveshare RPI WAVEGO Pro ACCE (EU)
Brak towaru
Robot kroczący Waveshare 32189 w wersji WAVEGO Pro BASIC z 12 stopniami swobody, wyposażony w serwomechanizmy magistrali szeregowej z informacją zwrotną oraz 9-osiowy czujnik IMU ICM20948, oparty na sterowniku ESP32-D0WDQ6-V3. Konstrukcja umożliwia realizację kinematyki odwrotnej, stabilizację postawy oraz sterowanie bezprzewodowe przez interfejs webowy z funkcją zapisu i odtwarzania sekwencji ruchów (JSON), przeznaczona do zastosowań edukacyjnych, badawczych i projektów robotyki mobilnej. Waveshare WAVEGO Pro (EU)
Brak towaru
Zaawansowany robot sześcionożny (hexapod) o 18 stopniach swobody oparty na mikrokontrolerze ESP32-WROOM-32. Konstrukcja wykorzystuje serwomechanizmy magistrali o momencie 30kg.cm, czujnik IMU ICM20948 oraz sterowanie ruchem wektorowym i funkcję samobalansowania. Platforma open source umożliwia rozbudowę o Raspberry Pi oraz rozwój własnych algorytmów sterowania. Waveshare HexArth (EU)
Brak towaru
Edukacyjny zestaw do budowy humanoidalnego robota wyposażonego w 17 serwomechanizmów magistralowych, umożliwiających wykonywanie złożonych ruchów takich jak chodzenie czy gesty. Platforma wykorzystuje mikrokontroler Seeed Studio XIAO ESP32S3 z łącznością Wi-Fi i Bluetooth LE, co pozwala na integrację z projektami IoT oraz zdalne sterowanie. System oferuje webowy edytor ruchu umożliwiający wizualne programowanie pozycji serw i zapisywanie sekwencji w formacie JSON. Otwarta konstrukcja oraz komunikacja UART pozwalają na współpracę z platformami takimi jak Raspberry Pi, Arduino, ESP32 czy STM32. Seeed Studio 100092737
Brak towaru
Humanoidalna platforma robotyczna o 10 stopniach swobody przeznaczona do nauki robotyki, sterowania ruchem oraz programowania systemów wbudowanych. Robot wykorzystuje 10 magistralowych serwomechanizmów Fashionstar RA8-U25H-M oraz mikrokontroler XIAO ESP32S3 z łącznością Wi-Fi i Bluetooth LE. System umożliwia bezprzewodowe sterowanie, programowanie sekwencji ruchów oraz współpracę z platformami takimi jak Raspberry Pi, Arduino, STM32 czy ESP32 przez interfejs UART. Otwarta konstrukcja oparta na elementach drukowanych 3D oraz dostępny w przeglądarce wizualny edytor ruchu ułatwiają tworzenie i modyfikowanie animacji robota. Seeed Studio 100064698
Brak towaru
Platforma edukacyjna łącząca cechy robota dwunożnego i pojazdu kołowego, umożliwiająca naukę robotyki, sterowania ruchem i algorytmów stabilizacji. Robot wykorzystuje bezszczotkowe silniki gimbal 2208 sterowane z użyciem technologii FOC, co zapewnia precyzyjne sterowanie momentem obrotowym, prędkością i pozycją. Konstrukcja oparta na modelu kinematyki całego ciała oraz adaptacyjnym algorytmie stabilizacji pozwala na dynamiczne balansowanie i poruszanie się po nierównym terenie. Seeed Studio 100090157
Brak towaru
Platforma edukacyjna łącząca cechy robota dwunożnego i pojazdu kołowego, umożliwiająca naukę robotyki, sterowania ruchem i algorytmów stabilizacji. Robot wykorzystuje bezszczotkowe silniki gimbal 2208 sterowane z użyciem technologii FOC, co zapewnia precyzyjne sterowanie momentem obrotowym, prędkością i pozycją. Konstrukcja oparta na modelu kinematyki całego ciała oraz adaptacyjnym algorytmie stabilizacji pozwala na dynamiczne balansowanie i poruszanie się po nierównym terenie. Seeed Studio 100090157