1 693,26 zł Netto
Zaawansowany robot sześcionożny (hexapod) o 18 stopniach swobody oparty na mikrokontrolerze ESP32-WROOM-32. Konstrukcja wykorzystuje serwomechanizmy magistrali o momencie 30kg.cm, czujnik IMU ICM20948 oraz sterowanie ruchem wektorowym i funkcję samobalansowania. Platforma open source umożliwia rozbudowę o Raspberry Pi oraz rozwój własnych algorytmów sterowania. Waveshare HexArth (EU)
HexArth to zaawansowany robot mobilny typu hexapod inspirowany biomechaniką ruchu owadów. Konstrukcja wykorzystuje 18 stopni swobody (DOF) - po trzy dla każdej z sześciu nóg - co umożliwia precyzyjne generowanie trajektorii ruchu, stabilne poruszanie się po nierównych powierzchniach oraz realizację złożonych algorytmów chodu. System sterowania oparty został na mikrokontrolerze ESP32 pełniącym funkcję kontrolera niskiego poziomu odpowiedzialnego za obliczenia kinematyki odwrotnej, generowanie chodu oraz obsługę czujników.
Robot wykorzystuje cyfrowe serwomechanizmy magistrali o momencie 30kg.cm umożliwiające odczyt parametrów pracy takich jak pozycja, prędkość czy napięcie zasilania. Dzięki temu możliwe jest monitorowanie stanu układu napędowego w czasie rzeczywistym oraz implementacja zaawansowanych algorytmów sterowania ruchem.
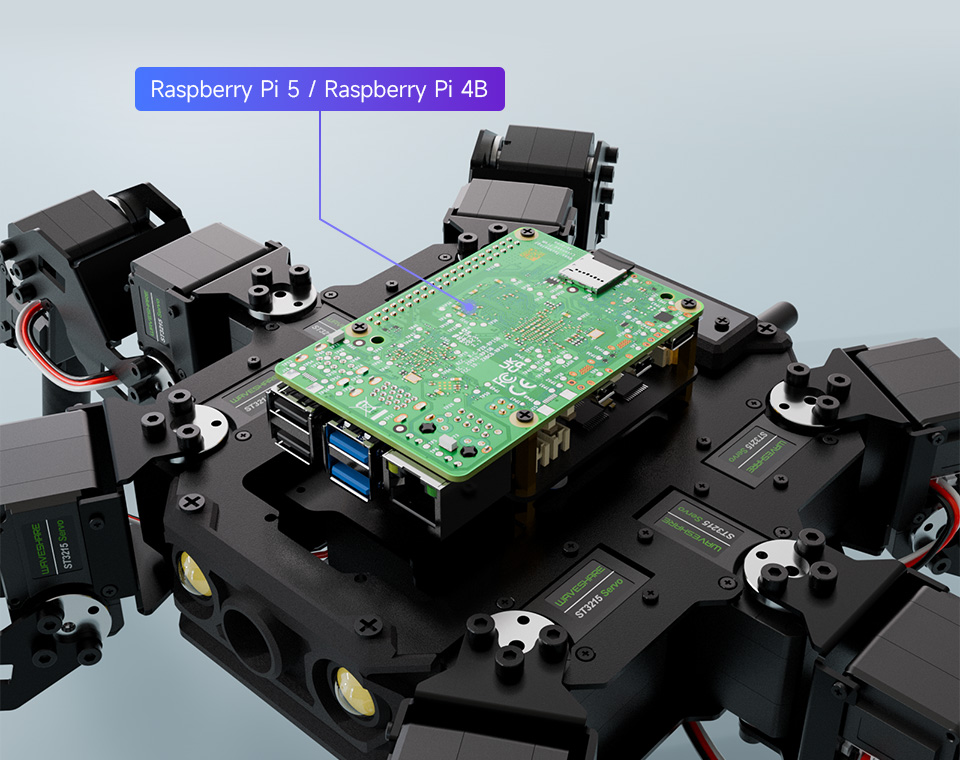
Konstrukcja mechaniczna wykonana została z aluminium oraz włókna węglowego, co zapewnia wysoką sztywność przy zachowaniu stosunkowo niewielkiej masy. Platforma zaprojektowana została jako system modularny umożliwiający dalszą rozbudowę o dodatkowy komputer jednopłytkowy, np. Raspberry Pi 4B lub Raspberry Pi 5, który może pełnić rolę kontrolera wysokiego poziomu odpowiedzialnego za analizę obrazu, autonomiczne podejmowanie decyzji lub przetwarzanie danych sensorycznych.
Czujnik ruchu ICM20948 zapewnia pomiar orientacji przestrzennej robota w dziewięciu osiach. Integracja akcelerometru, żyroskopu oraz magnetometru umożliwia precyzyjne określanie położenia robota i realizację algorytmów samobalansowania, co pozwala na stabilne utrzymywanie pozycji nawet podczas dynamicznego ruchu lub nierównego podłoża.
Układ IMU dostarcza w czasie rzeczywistym dane dotyczące przyspieszeń liniowych, prędkości kątowych oraz kierunku pola magnetycznego Ziemi. Informacje te wykorzystywane są do obliczania orientacji przestrzennej robota (roll, pitch, yaw) oraz do ciągłej korekcji pozycji podczas ruchu. Dzięki temu możliwe jest szybkie reagowanie na zmiany nachylenia podłoża, kompensowanie przechyłów konstrukcji oraz utrzymywanie stabilnej postawy podczas wykonywania kroków przez poszczególne nogi robota.
Robot generuje własny punkt dostępowy Wi-Fi po uruchomieniu. Sterowanie odbywa się poprzez interfejs Web dostępny z poziomu przeglądarki w komputerze lub smartfonie. Rozwiązanie nie wymaga instalowania aplikacji ani konfiguracji środowiska programistycznego, umożliwiając szybkie rozpoczęcie pracy z robotem.
Interfejs sterowania działa w oparciu o serwer HTTP uruchamiany bezpośrednio na mikrokontrolerze ESP32. Strona sterowania udostępnia elementy kontroli ruchu, parametrów chodu oraz podstawowych funkcji robota, które mogą być obsługiwane w czasie rzeczywistym z poziomu przeglądarki. Komunikacja odbywa się bezpośrednio pomiędzy urządzeniem sterującym a robotem poprzez lokalną sieć Wi-Fi, co pozwala na szybkie przesyłanie poleceń sterujących bez potrzeby korzystania z zewnętrznej infrastruktury sieciowej.


Platforma wyposażona została w wyświetlacz OLED o przekątnej 0,91", który może prezentować podstawowe informacje diagnostyczne oraz status pracy robota. Zawartość wyświetlacza można modyfikować z poziomu aplikacji Web lub poprzez komunikację UART z kontrolerem nadrzędnym.
Na ekranie mogą być wyświetlane między innymi parametry połączenia sieciowego, adres IP urządzenia, adres MAC interfejsu Wi-Fi oraz napięcie zasilania akumulatora. Pozwala to na szybkie sprawdzenie stanu systemu bez konieczności łączenia się z interfejsem sterowania.
W pobliżu wyświetlacza znajdują się także elementy interfejsu sprzętowego, takie jak przycisk zasilania, złącze ładowania DC 5.5 × 2.1 mm oraz port rozszerzeń do podłączania dodatkowych modułów. Antena Wi-Fi modułu ESP32 umożliwia stabilną komunikację bezprzewodową z urządzeniami sterującymi.
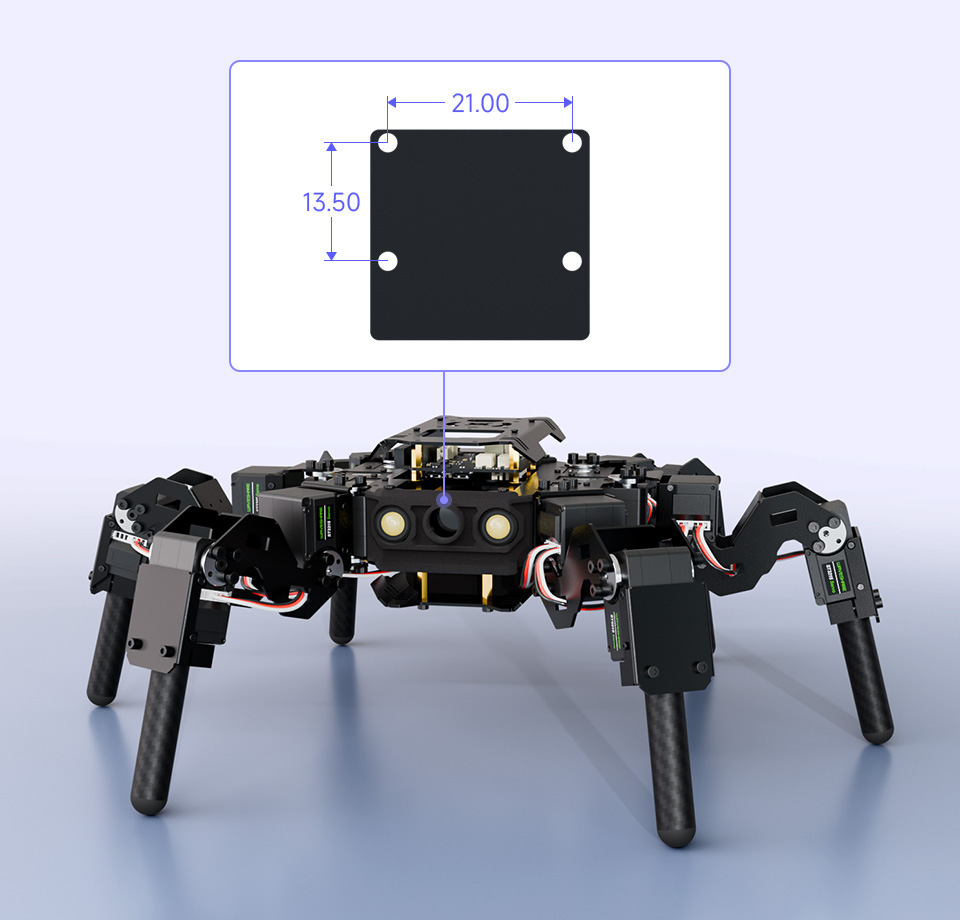
Konstrukcja mechaniczna robota posiada przygotowane otwory montażowe umożliwiające instalację kamery kompatybilnej z platformą. Rozwiązanie pozwala na implementację systemów wizyjnych oraz algorytmów przetwarzania obrazu. Dedykowane miejsce montażowe umożliwia stabilne zamocowanie modułów kamer stosowanych w systemach wbudowanych oraz prowadzenie przewodów sygnałowych bez ingerencji w konstrukcję robota.
Umiejscowienie kamery w przedniej części platformy zapewnia korzystne pole obserwacji względem kierunku ruchu, co ułatwia analizę otoczenia podczas przemieszczania się robota. Konstrukcja montażowa umożliwia także instalację lekkich uchwytów lub dodatkowych modułów współpracujących z systemem wizyjnym, zwiększając możliwości eksperymentalne platformy.
Takie rozwiązanie ułatwia integrację robota z projektami wykorzystującymi analizę obrazu, systemy monitorowania otoczenia oraz eksperymentalne aplikacje z zakresu robotyki mobilnej.

Dokumentacja projektu obejmuje kompletny kod źródłowy, przykłady programów oraz opis interfejsów komunikacyjnych umożliwiających rozwój własnego oprogramowania sterującego. Udostępnione materiały pozwalają na modyfikację algorytmów ruchu oraz implementację nowych funkcji sterowania robota.
Platforma umożliwia programową kontrolę takich mechanizmów jak:
Robotem można sterować nie tylko poprzez wbudowaną aplikację Web dostępną w przeglądarce na komputerze, tablecie lub smartfonie, ale również programowo z wykorzystaniem interfejsów komunikacyjnych takich jak UART, HTTP czy ESP-NOW. Otwarta architektura systemu umożliwia tworzenie własnych aplikacji sterujących, implementację algorytmów ruchu oraz integrację z systemami automatyki i projektami badawczymi z zakresu robotyki mobilnej.
Platforma umożliwia instalację komputera Raspberry Pi 4B lub Raspberry Pi 5 pełniącego funkcję kontrolera nadrzędnego. Komunikacja z kontrolerem ESP32 odbywa się poprzez interfejs UART. ESP32 realizuje obliczenia niskiego poziomu, takie jak kinematyka odwrotna mechanizmu nóg, interpolację pozycji serwomechanizmów oraz generowanie trajektorii chodu.
Takie rozdzielenie zadań pozwala odciążyć komputer nadrzędny i zapewnić stabilne sterowanie układem napędowym w czasie rzeczywistym. Raspberry Pi może dzięki temu realizować bardziej złożone operacje obliczeniowe, takie jak analiza obrazu z kamery, przetwarzanie danych z czujników, planowanie trajektorii ruchu czy implementacja algorytmów autonomicznej nawigacji.
Architektura systemu umożliwia budowę wielowarstwowego systemu sterowania, w którym ESP32 odpowiada za szybkie operacje sterowania sprzętem, natomiast Raspberry Pi pełni rolę jednostki obliczeniowej wysokiego poziomu integrującej algorytmy percepcji, planowania oraz podejmowania decyzji.
Platforma HexArth znajduje zastosowanie w projektach edukacyjnych, badaniach nad robotyką mobilną oraz podczas rozwijania własnych systemów sterowania i autonomii robotów. Konstrukcja robota oraz otwarta architektura sprzętowo-programowa umożliwiają prowadzenie eksperymentów z algorytmami ruchu, systemami percepcji otoczenia oraz integracją dodatkowych modułów i czujników.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Robot kroczący Waveshare 32193 w wersji WAVEGO Pro PI5 KIT z 12 stopniami swobody, wyposażony w serwomechanizmy magistrali szeregowej z informacją zwrotną, 9-osiowy czujnik IMU ICM20948, kamerę 5MP 160° oraz wbudowany Raspberry Pi 5 jako kontroler nadrzędny. Konstrukcja umożliwia realizację kinematyki odwrotnej, stabilizację postawy, przetwarzanie obrazu oraz sterowanie bezprzewodowe przez interfejs webowy z funkcją zapisu i odtwarzania sekwencji ruchów (JSON), przeznaczona do zastosowań edukacyjnych, badawczych i projektów robotyki mobilnej. Waveshare PI5 WAVEGO Pro KIT (EU)
Brak towaru
Robot kroczący Waveshare 32191 w wersji WAVEGO Pro EX z 12 stopniami swobody, wyposażony w serwomechanizmy magistrali szeregowej z informacją zwrotną, 9-osiowy czujnik IMU ICM20948, kamerę 5MP 160° oraz możliwość współpracy z Raspberry Pi jako kontrolerem nadrzędnym. Konstrukcja umożliwia realizację kinematyki odwrotnej, stabilizację postawy, przetwarzanie obrazu oraz sterowanie bezprzewodowe przez interfejs webowy z funkcją zapisu i odtwarzania sekwencji ruchów (JSON), przeznaczona do zastosowań edukacyjnych, badawczych i projektów robotyki mobilnej. Waveshare RPI WAVEGO Pro ACCE (EU)
Brak towaru
Robot kroczący Waveshare 32189 w wersji WAVEGO Pro BASIC z 12 stopniami swobody, wyposażony w serwomechanizmy magistrali szeregowej z informacją zwrotną oraz 9-osiowy czujnik IMU ICM20948, oparty na sterowniku ESP32-D0WDQ6-V3. Konstrukcja umożliwia realizację kinematyki odwrotnej, stabilizację postawy oraz sterowanie bezprzewodowe przez interfejs webowy z funkcją zapisu i odtwarzania sekwencji ruchów (JSON), przeznaczona do zastosowań edukacyjnych, badawczych i projektów robotyki mobilnej. Waveshare WAVEGO Pro (EU)
Brak towaru
Zaawansowany robot sześcionożny (hexapod) o 18 stopniach swobody oparty na mikrokontrolerze ESP32-WROOM-32. Konstrukcja wykorzystuje serwomechanizmy magistrali o momencie 30kg.cm, czujnik IMU ICM20948 oraz sterowanie ruchem wektorowym i funkcję samobalansowania. Platforma open source umożliwia rozbudowę o Raspberry Pi oraz rozwój własnych algorytmów sterowania. Waveshare HexArth (EU)
Brak towaru
Edukacyjny zestaw do budowy humanoidalnego robota wyposażonego w 17 serwomechanizmów magistralowych, umożliwiających wykonywanie złożonych ruchów takich jak chodzenie czy gesty. Platforma wykorzystuje mikrokontroler Seeed Studio XIAO ESP32S3 z łącznością Wi-Fi i Bluetooth LE, co pozwala na integrację z projektami IoT oraz zdalne sterowanie. System oferuje webowy edytor ruchu umożliwiający wizualne programowanie pozycji serw i zapisywanie sekwencji w formacie JSON. Otwarta konstrukcja oraz komunikacja UART pozwalają na współpracę z platformami takimi jak Raspberry Pi, Arduino, ESP32 czy STM32. Seeed Studio 100092737
Brak towaru
Humanoidalna platforma robotyczna o 10 stopniach swobody przeznaczona do nauki robotyki, sterowania ruchem oraz programowania systemów wbudowanych. Robot wykorzystuje 10 magistralowych serwomechanizmów Fashionstar RA8-U25H-M oraz mikrokontroler XIAO ESP32S3 z łącznością Wi-Fi i Bluetooth LE. System umożliwia bezprzewodowe sterowanie, programowanie sekwencji ruchów oraz współpracę z platformami takimi jak Raspberry Pi, Arduino, STM32 czy ESP32 przez interfejs UART. Otwarta konstrukcja oparta na elementach drukowanych 3D oraz dostępny w przeglądarce wizualny edytor ruchu ułatwiają tworzenie i modyfikowanie animacji robota. Seeed Studio 100064698
Brak towaru
Platforma edukacyjna łącząca cechy robota dwunożnego i pojazdu kołowego, umożliwiająca naukę robotyki, sterowania ruchem i algorytmów stabilizacji. Robot wykorzystuje bezszczotkowe silniki gimbal 2208 sterowane z użyciem technologii FOC, co zapewnia precyzyjne sterowanie momentem obrotowym, prędkością i pozycją. Konstrukcja oparta na modelu kinematyki całego ciała oraz adaptacyjnym algorytmie stabilizacji pozwala na dynamiczne balansowanie i poruszanie się po nierównym terenie. Seeed Studio 100090157
Brak towaru
Zaawansowany robot sześcionożny (hexapod) o 18 stopniach swobody oparty na mikrokontrolerze ESP32-WROOM-32. Konstrukcja wykorzystuje serwomechanizmy magistrali o momencie 30kg.cm, czujnik IMU ICM20948 oraz sterowanie ruchem wektorowym i funkcję samobalansowania. Platforma open source umożliwia rozbudowę o Raspberry Pi oraz rozwój własnych algorytmów sterowania. Waveshare HexArth (EU)