








zł1,693.26 tax excl.
Advanced hexapod robot with 18 degrees of freedom powered by the ESP32-WROOM-32 microcontroller. The design uses serial bus servos with 30kg.cm torque, an ICM20948 IMU sensor, vector motion control and self-balancing functionality. The open source platform allows expansion with Raspberry Pi and development of custom control algorithms. Waveshare HexArth (EU)
HexArth is an advanced hexapod mobile robot inspired by insect biomechanics. The design features 18 degrees of freedom (DOF) - three for each of the six legs - enabling precise trajectory generation, stable movement over uneven terrain and implementation of complex gait algorithms. The control system is based on the ESP32 microcontroller acting as a low-level controller responsible for inverse kinematics calculations, gait generation and sensor management.
The robot uses digital serial bus servos with a torque of 30kg.cm that provide feedback parameters such as position, speed and supply voltage. This allows real-time monitoring of the drive system and implementation of advanced motion control algorithms.
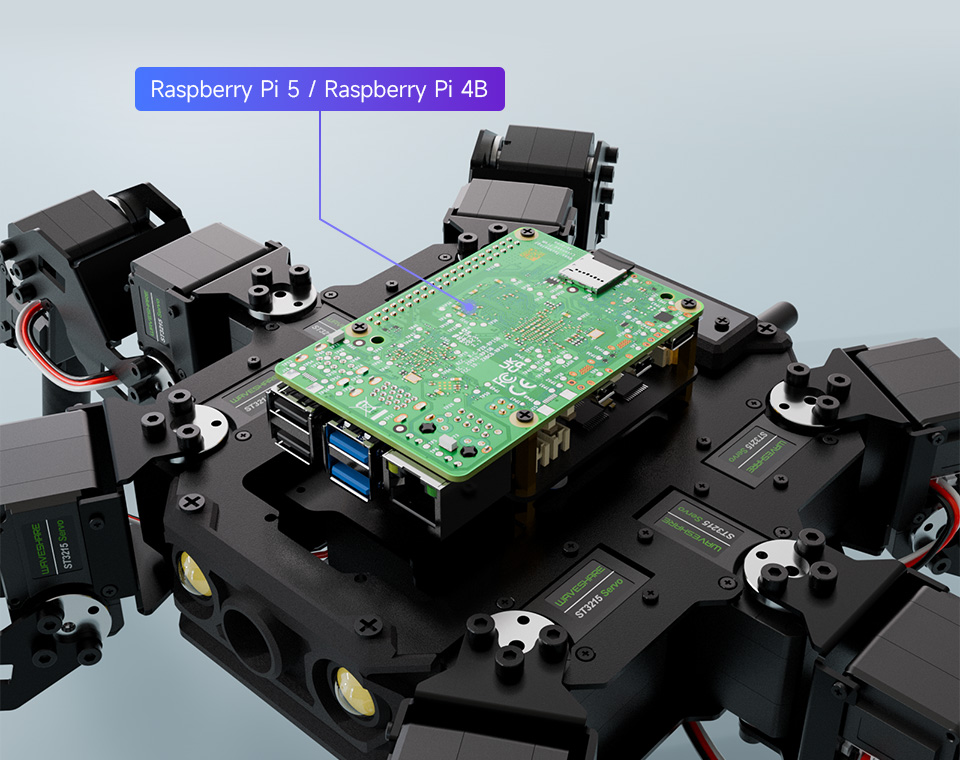
The mechanical structure is made of aluminum and carbon fiber, providing high rigidity while maintaining relatively low weight. The platform is designed as a modular system allowing further expansion with an additional single-board computer such as Raspberry Pi 4B or Raspberry Pi 5, which can act as a high-level controller responsible for image analysis, autonomous decision making or processing sensory data.
The ICM20948 motion sensor provides measurement of the robot's spatial orientation across nine axes. Integration of an accelerometer, gyroscope and magnetometer enables precise determination of the robot's position and supports self-balancing algorithms, allowing the robot to maintain a stable posture even during dynamic movement or when operating on uneven terrain.
The IMU continuously provides real-time data on linear acceleration, angular velocity and the Earth's magnetic field direction. These measurements are used to calculate the robot's spatial orientation (roll, pitch, yaw) and to continuously correct its posture during movement. As a result, the system can quickly respond to changes in ground inclination, compensate for structural tilting and maintain a stable stance while individual legs perform stepping motions.
The robot generates its own Wi-Fi access point on startup. Control is performed through a Web interface accessible from a browser on a computer or smartphone. This approach does not require installing dedicated software or configuring a programming environment, allowing quick and convenient operation of the robot.
The control interface operates through an HTTP server running directly on the ESP32 microcontroller. The control page provides elements for managing robot movement, gait parameters and basic system functions, which can be adjusted in real time from the browser. Communication takes place directly between the control device and the robot through a local Wi-Fi network, enabling fast transmission of control commands without the need for external network infrastructure.


The platform is equipped with a 0.91" OLED display that can present basic diagnostic information and the robot’s operating status. The display content can be modified through the Web application or via UART communication with a host controller.
The screen can show information such as network connection parameters, device IP address, Wi-Fi interface MAC address and battery supply voltage. This allows quick verification of system status without the need to connect to the control interface.
Near the display there are also hardware interface elements such as the power button, a DC 5.5 × 2.1 mm charging connector and an expansion port for connecting additional modules. The ESP32 Wi-Fi module antenna enables stable wireless communication with control devices.
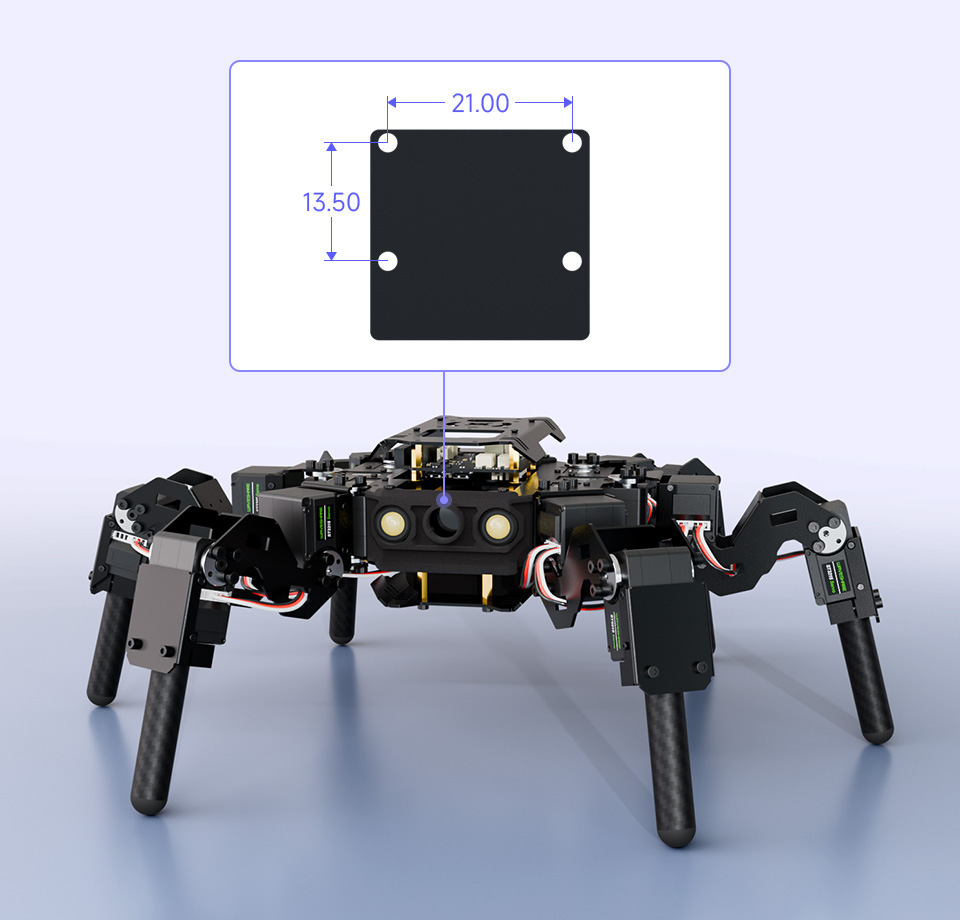
The mechanical structure of the robot includes dedicated mounting holes designed for installing a camera compatible with the platform. This solution enables implementation of vision systems and image processing algorithms. The dedicated mounting area allows stable installation of camera modules used in embedded systems while enabling cable routing without modifying the robot’s structure.
The camera is positioned at the front of the platform, providing a favorable field of view in relation to the robot's direction of movement. This arrangement facilitates observation of the surroundings and supports environmental analysis during robot navigation. The mounting structure also allows installation of lightweight brackets or additional modules cooperating with the vision system, increasing the platform’s experimental capabilities.
Such a design simplifies integration of the robot with projects involving image analysis, environmental monitoring systems and experimental applications in the field of mobile robotics.

The project documentation includes complete source code, example programs and a description of communication interfaces enabling development of custom control software. The provided materials allow modification of motion algorithms and implementation of additional robot control functions.
The platform enables programmatic control of mechanisms such as:
The robot can be controlled not only through the built-in Web application accessible from a browser on a computer, tablet or smartphone, but also programmatically using communication interfaces such as UART, HTTP or ESP-NOW. The open system architecture allows development of custom control applications, implementation of motion algorithms and integration with automation systems or research projects in the field of mobile robotics.
The platform allows installation of a Raspberry Pi 4B or Raspberry Pi 5 computer acting as a host controller. Communication with the ESP32 controller is performed through the UART interface. The ESP32 handles low-level computations such as inverse kinematics of the leg mechanism, servo position interpolation and gait trajectory generation.
This task distribution reduces the computational load on the host computer while ensuring stable real-time control of the drive system. As a result, the Raspberry Pi can perform more complex operations such as camera image analysis, sensor data processing, motion trajectory planning or implementation of autonomous navigation algorithms.
The system architecture enables the creation of a multi-layer control system in which the ESP32 is responsible for fast hardware-level operations, while the Raspberry Pi acts as a high-level computing unit integrating perception, planning and decision-making algorithms.
The HexArth platform can be used in educational projects, mobile robotics research and the development of custom robot control and autonomy systems. The robot’s design and open hardware-software architecture enable experimentation with motion algorithms, environmental perception systems and integration of additional modules and sensors.
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Waveshare 32193 quadruped robot in WAVEGO Pro PI5 KIT version with 12 degrees of freedom, serial bus servos with feedback, 9-axis IMU ICM20948, 5MP 160° camera, and integrated Raspberry Pi 5 as a host controller. Designed for inverse kinematics, posture stabilization, image processing, and wireless control via web interface with motion recording and playback (JSON), suitable for education, research, and mobile robotics projects. Waveshare PI5 WAVEGO Pro KIT (EU)
No product available!
Waveshare 32191 quadruped robot in WAVEGO Pro EX version with 12 degrees of freedom, serial bus servos with feedback, 9-axis IMU ICM20948, 5MP 160° camera, and support for Raspberry Pi as a host controller. Designed for inverse kinematics, posture stabilization, image processing, and wireless control via web interface with motion recording and playback (JSON), suitable for education, research, and mobile robotics projects. Waveshare RPI WAVEGO Pro ACCE (EU)
No product available!
Waveshare 32189 WAVEGO Pro BASIC quadruped robot with 12 degrees of freedom, equipped with serial bus servos with feedback and a 9-axis ICM20948 IMU sensor, based on the ESP32-D0WDQ6-V3 controller. The design enables inverse kinematics implementation, posture stabilization, and wireless control via a web interface with motion recording and playback (JSON), intended for educational, research, and mobile robotics projects. Waveshare WAVEGO Pro (EU)
No product available!
Advanced hexapod robot with 18 degrees of freedom powered by the ESP32-WROOM-32 microcontroller. The design uses serial bus servos with 30kg.cm torque, an ICM20948 IMU sensor, vector motion control and self-balancing functionality. The open source platform allows expansion with Raspberry Pi and development of custom control algorithms. Waveshare HexArth (EU)
No product available!
An educational kit for building a humanoid robot equipped with 17 bus servos, enabling complex movements such as walking and gestures. The platform uses the Seeed Studio XIAO ESP32S3 microcontroller with Wi-Fi and Bluetooth LE connectivity, enabling integration with IoT projects and remote control. The system offers a web-based motion editor for visual programming of servo positions and saving sequences in JSON format. The open design and UART communication enable compatibility with platforms such as Raspberry Pi, Arduino, ESP32, and STM32. Seeed Studio 100092737
No product available!
A humanoid robotic platform with 10 degrees of freedom designed for learning robotics, motion control, and embedded system programming. The robot utilizes 10 Fashionstar RA8-U25H-M bus-based servos and a XIAO ESP32S3 microcontroller with Wi-Fi and Bluetooth LE connectivity. The system enables wireless control, motion sequence programming, and compatibility with platforms such as Raspberry Pi, Arduino, STM32, and ESP32 via a UART interface. The open design, based on 3D printed components, and a browser-based visual motion editor make it easy to create and modify robot animations. Seeed Studio 100064698
No product available!
An educational platform combining the features of a bipedal robot and a wheeled vehicle, enabling the learning of robotics, motion control, and stabilization algorithms. The robot utilizes brushless 2208 gimbal motors controlled using FOC technology, providing precise torque, velocity, and position control. A design based on a full-body kinematics model and an adaptive stabilization algorithm enables dynamic balancing and movement on uneven terrain. Seeed Studio 100090157
No product available!
Advanced hexapod robot with 18 degrees of freedom powered by the ESP32-WROOM-32 microcontroller. The design uses serial bus servos with 30kg.cm torque, an ICM20948 IMU sensor, vector motion control and self-balancing functionality. The open source platform allows expansion with Raspberry Pi and development of custom control algorithms. Waveshare HexArth (EU)