










zł1,708.73 tax excl.
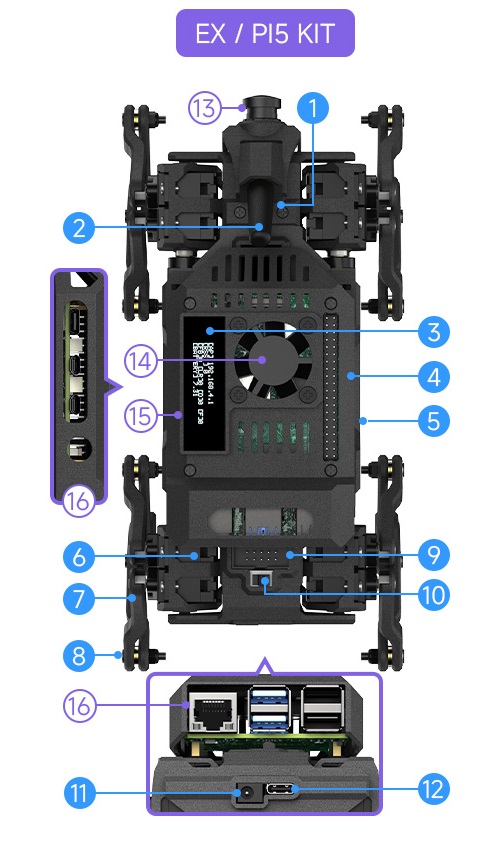
Waveshare 32193 quadruped robot in WAVEGO Pro PI5 KIT version with 12 degrees of freedom, serial bus servos with feedback, 9-axis IMU ICM20948, 5MP 160° camera, and integrated Raspberry Pi 5 as a host controller. Designed for inverse kinematics, posture stabilization, image processing, and wireless control via web interface with motion recording and playback (JSON), suitable for education, research, and mobile robotics projects. Waveshare PI5 WAVEGO Pro KIT (EU)
WAVEGO Pro PI5 KIT includes a quadruped robot inspired by animal locomotion, designed for learning robotics, programming, and developing mobile projects, along with a built-in Raspberry Pi 5 (4 GB), accessories pack, 8.4 V 2 A (EU) power supply, and components required to operate the platform and integrate the 5MP vision system.
The design supports implementation of motion control algorithms and real-time analysis of multi-link kinematics. The architecture based on an ESP32 controller cooperating with Raspberry Pi enables task distribution between low-level control (motion execution) and high-level processing (image analysis and decision logic), extending system capabilities and supporting advanced development scenarios.
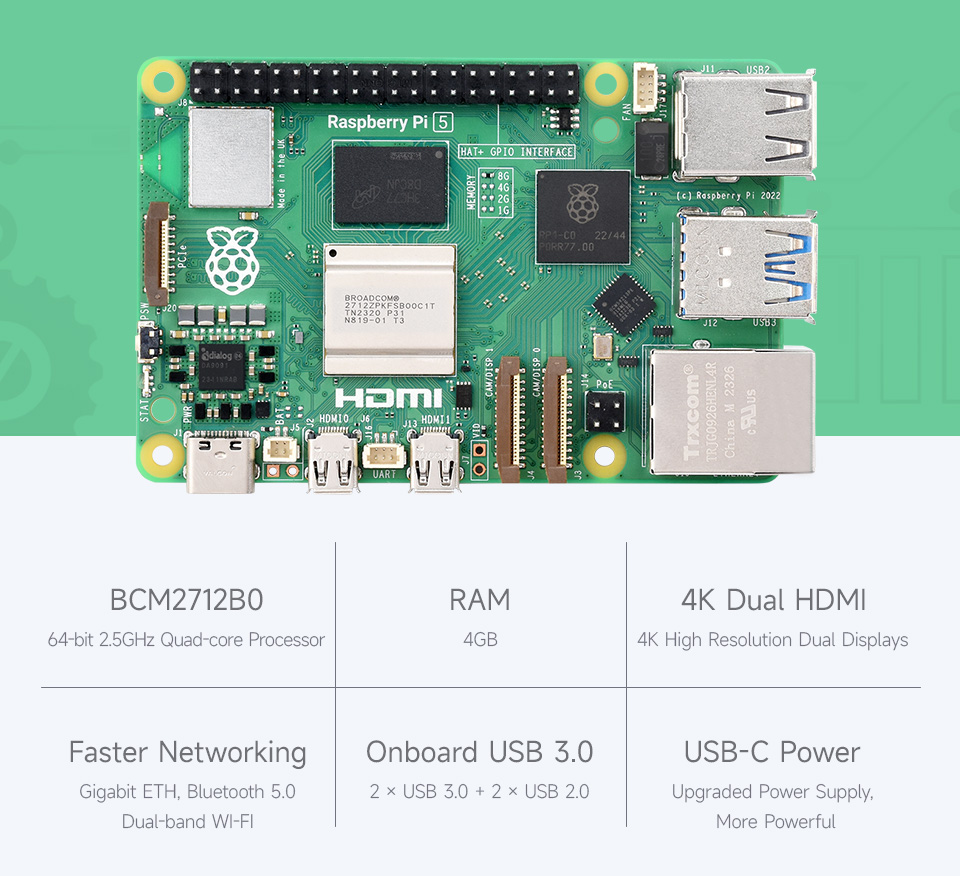
The option to use Raspberry Pi 4B or Raspberry Pi 5 as a host controller (Raspberry Pi 5 4GB is included and integrated into the device) enables advanced computing functions and real-time data processing. The system cooperates with the ESP32 controller responsible for motion trajectory generation and kinematics handling, allowing Raspberry Pi resources to be utilized for high-level algorithms and processing data from sensors and the camera.
The solution supports development of applications using libraries such as OpenCV, network communication handling, and integration with IoT and AI systems. The host-sub architecture enables parallel execution of control tasks and data analysis, improving operational stability and extending the system with autonomous functions and vision-based capabilities.
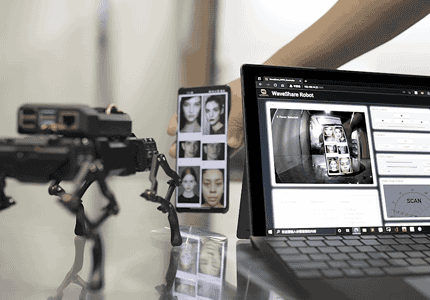
The integrated camera with a resolution of 5MP and a 160° field of view enables image acquisition and real-time processing. The module cooperates with Raspberry Pi, allowing direct use of visual data in control algorithms and environment analysis.
Supported functions include facial recognition, color tracking, and motion detection implemented using OpenCV libraries. The wide field of view increases the observable area, which is important in mobile applications and systems reacting to environmental changes. The camera is available in RPI WAVEGO Pro ACCE and PI5 WAVEGO Pro KIT versions.

The design with 12 degrees of freedom uses multi-link leg mechanisms which, combined with inverse kinematics algorithms, enable precise control of limb positions. This approach allows generation of smooth motion trajectories and improves the efficiency of torque transfer from the servos. The robot can perform various gait patterns and dynamic posture changes.
The use of serial bus servos enables feedback transmission of operating parameters such as position and speed, allowing more accurate and repeatable motion control. The drive system architecture supports synchronization of all axes, which is important for executing complex motion sequences.
The mechanical structure of the legs ensures even load distribution during ground contact, improving motion stability and reducing stress on individual drive components. The solution is suitable for applications requiring precise motion reproduction and testing of control algorithms for legged robots.
The use of a 9-axis ICM20948 sensor enables continuous monitoring of the robot's orientation. Data from the accelerometer, gyroscope, and magnetometer are used for posture stabilization and compensation of deviations during movement. This allows maintaining balance and adapting operation to changing ground conditions.
Układ pomiarowy umożliwia szybką reakcję na zmiany położenia, co poprawia kontrolę nad ruchem oraz ogranicza ryzyko utraty stabilności podczas wykonywania sekwencji ruchowych.


Control is performed via a web interface accessible through a browser, using an automatically generated WiFi access point. The solution does not require installation of additional software or environment configuration. The system allows saving commands in JSON format as task files in the ESP32 memory, enabling playback of predefined motion sequences and execution of repeatable operations.
The control interface enables real-time management of basic robot functions, including switching motion modes and triggering previously saved sequences. Wireless communication allows operation without a direct wired connection, increasing flexibility in various application scenarios.
Saved sequences can be used for testing control algorithms and repeatable workflows, making the system suitable for educational environments and robotic prototyping.
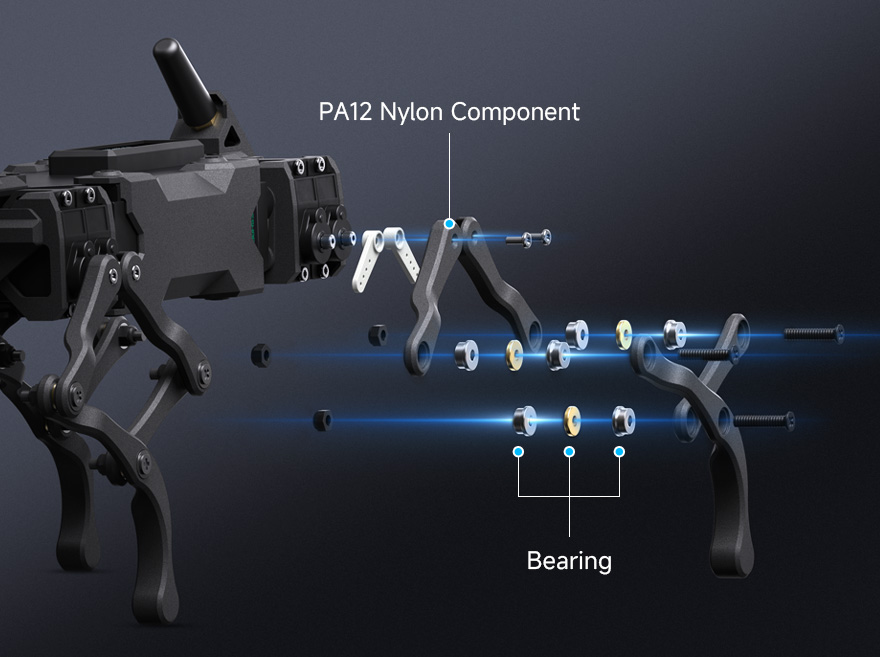
The body made of 5052 aluminum alloy and PA12 material ensures high mechanical strength while maintaining relatively low weight. The use of multiple bearing joints improves durability and smooth operation of the mechanisms. The compact design allows the robot to operate in limited workspace environments.
The structure is designed to provide easy access to mechanical and electronic components, facilitating maintenance and modifications during development. The selected materials reduce deformation under load, contributing to stable motion parameters.
The load-bearing structure provides adequate rigidity while maintaining mobility, which is important for executing dynamic motion sequences and operating in various working configurations.
The robot is used in education, research, and prototyping of mobile systems, where motion analysis, implementation of control algorithms, and integration of embedded systems are essential. The design enables experiments in kinematics, control, and wireless communication, as well as testing solutions used in autonomous robots and mechatronic systems.
Element:
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Waveshare 32191 quadruped robot in WAVEGO Pro EX version with 12 degrees of freedom, serial bus servos with feedback, 9-axis IMU ICM20948, 5MP 160° camera, and support for Raspberry Pi as a host controller. Designed for inverse kinematics, posture stabilization, image processing, and wireless control via web interface with motion recording and playback (JSON), suitable for education, research, and mobile robotics projects. Waveshare RPI WAVEGO Pro ACCE (EU)
No product available!
Waveshare 32189 WAVEGO Pro BASIC quadruped robot with 12 degrees of freedom, equipped with serial bus servos with feedback and a 9-axis ICM20948 IMU sensor, based on the ESP32-D0WDQ6-V3 controller. The design enables inverse kinematics implementation, posture stabilization, and wireless control via a web interface with motion recording and playback (JSON), intended for educational, research, and mobile robotics projects. Waveshare WAVEGO Pro (EU)
No product available!
Waveshare 32193 quadruped robot in WAVEGO Pro PI5 KIT version with 12 degrees of freedom, serial bus servos with feedback, 9-axis IMU ICM20948, 5MP 160° camera, and integrated Raspberry Pi 5 as a host controller. Designed for inverse kinematics, posture stabilization, image processing, and wireless control via web interface with motion recording and playback (JSON), suitable for education, research, and mobile robotics projects. Waveshare PI5 WAVEGO Pro KIT (EU)
No product available!
Waveshare 32191 quadruped robot in WAVEGO Pro EX version with 12 degrees of freedom, serial bus servos with feedback, 9-axis IMU ICM20948, 5MP 160° camera, and support for Raspberry Pi as a host controller. Designed for inverse kinematics, posture stabilization, image processing, and wireless control via web interface with motion recording and playback (JSON), suitable for education, research, and mobile robotics projects. Waveshare RPI WAVEGO Pro ACCE (EU)
No product available!
Waveshare 32189 WAVEGO Pro BASIC quadruped robot with 12 degrees of freedom, equipped with serial bus servos with feedback and a 9-axis ICM20948 IMU sensor, based on the ESP32-D0WDQ6-V3 controller. The design enables inverse kinematics implementation, posture stabilization, and wireless control via a web interface with motion recording and playback (JSON), intended for educational, research, and mobile robotics projects. Waveshare WAVEGO Pro (EU)
No product available!
Advanced hexapod robot with 18 degrees of freedom powered by the ESP32-WROOM-32 microcontroller. The design uses serial bus servos with 30kg.cm torque, an ICM20948 IMU sensor, vector motion control and self-balancing functionality. The open source platform allows expansion with Raspberry Pi and development of custom control algorithms. Waveshare HexArth (EU)
No product available!
An educational kit for building a humanoid robot equipped with 17 bus servos, enabling complex movements such as walking and gestures. The platform uses the Seeed Studio XIAO ESP32S3 microcontroller with Wi-Fi and Bluetooth LE connectivity, enabling integration with IoT projects and remote control. The system offers a web-based motion editor for visual programming of servo positions and saving sequences in JSON format. The open design and UART communication enable compatibility with platforms such as Raspberry Pi, Arduino, ESP32, and STM32. Seeed Studio 100092737
No product available!
A humanoid robotic platform with 10 degrees of freedom designed for learning robotics, motion control, and embedded system programming. The robot utilizes 10 Fashionstar RA8-U25H-M bus-based servos and a XIAO ESP32S3 microcontroller with Wi-Fi and Bluetooth LE connectivity. The system enables wireless control, motion sequence programming, and compatibility with platforms such as Raspberry Pi, Arduino, STM32, and ESP32 via a UART interface. The open design, based on 3D printed components, and a browser-based visual motion editor make it easy to create and modify robot animations. Seeed Studio 100064698
No product available!
An educational platform combining the features of a bipedal robot and a wheeled vehicle, enabling the learning of robotics, motion control, and stabilization algorithms. The robot utilizes brushless 2208 gimbal motors controlled using FOC technology, providing precise torque, velocity, and position control. A design based on a full-body kinematics model and an adaptive stabilization algorithm enables dynamic balancing and movement on uneven terrain. Seeed Studio 100090157
No product available!
Waveshare 32193 quadruped robot in WAVEGO Pro PI5 KIT version with 12 degrees of freedom, serial bus servos with feedback, 9-axis IMU ICM20948, 5MP 160° camera, and integrated Raspberry Pi 5 as a host controller. Designed for inverse kinematics, posture stabilization, image processing, and wireless control via web interface with motion recording and playback (JSON), suitable for education, research, and mobile robotics projects. Waveshare PI5 WAVEGO Pro KIT (EU)