












zł1,539.23 tax excl.
An educational platform combining the features of a bipedal robot and a wheeled vehicle, enabling the learning of robotics, motion control, and stabilization algorithms. The robot utilizes brushless 2208 gimbal motors controlled using FOC technology, providing precise torque, velocity, and position control. A design based on a full-body kinematics model and an adaptive stabilization algorithm enables dynamic balancing and movement on uneven terrain. Seeed Studio 100090157
StackForce Mini Wheeled-Legged Robot is a compact, two-legged wheeled robot designed as an educational and research platform for learning robotics, motion control, and stabilization algorithms. The robot combines features of a bipedal robot and a wheeled vehicle, enabling dynamic balancing, fast movement, and stable driving on various surfaces. Thanks to an advanced whole-body kinematics model and an adaptive stabilization algorithm, the robot can maintain balance even on uneven terrain and perform complex movements. The robot is equipped with 2208 gimbal-type brushless motors controlled by a controller using FOC (Field-Oriented Control) technology. This enables precise control of speed, position, and torque in both open-loop and closed-loop control modes. Such a solution ensures smooth motion and high stability during driving and maneuvering.

The core of the platform is a controller based on the ESP32 microcontroller, which offers high computing performance and a wide range of communication interfaces such as I2C, SPI, PWM, and others. This allows the robot to be easily expanded with additional sensors and modules, making it a flexible platform for experiments and the development of new features. The robot supports multiple control methods, including remote control via Wi-Fi, a Bluetooth controller, a serial port, and a traditional RC transmitter. Users can program the robot’s behavior and modify its control algorithms according to their needs. A built-in high-precision MT6701 magnetic encoder enables accurate measurement of motor position, resulting in stable motion control.
The platform has been designed as an open-source project, meaning that both the source code and design files are available to users. This makes it possible to conduct independent research, modify the mechanical structure, and develop new robot functions. The kit also includes detailed documentation, example programs, and training materials in the form of video courses. As a result, the robot can be used both by beginner robotics enthusiasts and by more advanced users working on control algorithms, stabilization systems, or autonomous robotics applications.
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
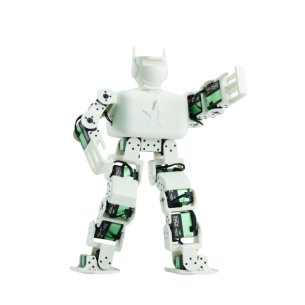
An educational kit for building a humanoid robot equipped with 17 bus servos, enabling complex movements such as walking and gestures. The platform uses the Seeed Studio XIAO ESP32S3 microcontroller with Wi-Fi and Bluetooth LE connectivity, enabling integration with IoT projects and remote control. The system offers a web-based motion editor for visual programming of servo positions and saving sequences in JSON format. The open design and UART communication enable compatibility with platforms such as Raspberry Pi, Arduino, ESP32, and STM32. Seeed Studio 100092737
No product available!
A humanoid robotic platform with 10 degrees of freedom designed for learning robotics, motion control, and embedded system programming. The robot utilizes 10 Fashionstar RA8-U25H-M bus-based servos and a XIAO ESP32S3 microcontroller with Wi-Fi and Bluetooth LE connectivity. The system enables wireless control, motion sequence programming, and compatibility with platforms such as Raspberry Pi, Arduino, STM32, and ESP32 via a UART interface. The open design, based on 3D printed components, and a browser-based visual motion editor make it easy to create and modify robot animations. Seeed Studio 100064698
No product available!
Waveshare 32193 quadruped robot in WAVEGO Pro PI5 KIT version with 12 degrees of freedom, serial bus servos with feedback, 9-axis IMU ICM20948, 5MP 160° camera, and integrated Raspberry Pi 5 as a host controller. Designed for inverse kinematics, posture stabilization, image processing, and wireless control via web interface with motion recording and playback (JSON), suitable for education, research, and mobile robotics projects. Waveshare PI5 WAVEGO Pro KIT (EU)
No product available!
Waveshare 32191 quadruped robot in WAVEGO Pro EX version with 12 degrees of freedom, serial bus servos with feedback, 9-axis IMU ICM20948, 5MP 160° camera, and support for Raspberry Pi as a host controller. Designed for inverse kinematics, posture stabilization, image processing, and wireless control via web interface with motion recording and playback (JSON), suitable for education, research, and mobile robotics projects. Waveshare RPI WAVEGO Pro ACCE (EU)
No product available!
Waveshare 32189 WAVEGO Pro BASIC quadruped robot with 12 degrees of freedom, equipped with serial bus servos with feedback and a 9-axis ICM20948 IMU sensor, based on the ESP32-D0WDQ6-V3 controller. The design enables inverse kinematics implementation, posture stabilization, and wireless control via a web interface with motion recording and playback (JSON), intended for educational, research, and mobile robotics projects. Waveshare WAVEGO Pro (EU)
No product available!
Advanced hexapod robot with 18 degrees of freedom powered by the ESP32-WROOM-32 microcontroller. The design uses serial bus servos with 30kg.cm torque, an ICM20948 IMU sensor, vector motion control and self-balancing functionality. The open source platform allows expansion with Raspberry Pi and development of custom control algorithms. Waveshare HexArth (EU)
No product available!
An educational kit for building a humanoid robot equipped with 17 bus servos, enabling complex movements such as walking and gestures. The platform uses the Seeed Studio XIAO ESP32S3 microcontroller with Wi-Fi and Bluetooth LE connectivity, enabling integration with IoT projects and remote control. The system offers a web-based motion editor for visual programming of servo positions and saving sequences in JSON format. The open design and UART communication enable compatibility with platforms such as Raspberry Pi, Arduino, ESP32, and STM32. Seeed Studio 100092737
No product available!
A humanoid robotic platform with 10 degrees of freedom designed for learning robotics, motion control, and embedded system programming. The robot utilizes 10 Fashionstar RA8-U25H-M bus-based servos and a XIAO ESP32S3 microcontroller with Wi-Fi and Bluetooth LE connectivity. The system enables wireless control, motion sequence programming, and compatibility with platforms such as Raspberry Pi, Arduino, STM32, and ESP32 via a UART interface. The open design, based on 3D printed components, and a browser-based visual motion editor make it easy to create and modify robot animations. Seeed Studio 100064698
No product available!
An educational platform combining the features of a bipedal robot and a wheeled vehicle, enabling the learning of robotics, motion control, and stabilization algorithms. The robot utilizes brushless 2208 gimbal motors controlled using FOC technology, providing precise torque, velocity, and position control. A design based on a full-body kinematics model and an adaptive stabilization algorithm enables dynamic balancing and movement on uneven terrain. Seeed Studio 100090157
No product available!
An educational platform combining the features of a bipedal robot and a wheeled vehicle, enabling the learning of robotics, motion control, and stabilization algorithms. The robot utilizes brushless 2208 gimbal motors controlled using FOC technology, providing precise torque, velocity, and position control. A design based on a full-body kinematics model and an adaptive stabilization algorithm enables dynamic balancing and movement on uneven terrain. Seeed Studio 100090157