515,15 zł Netto
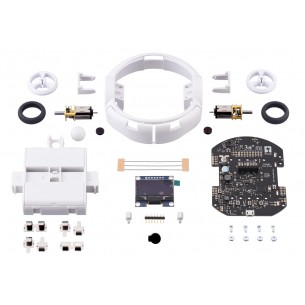
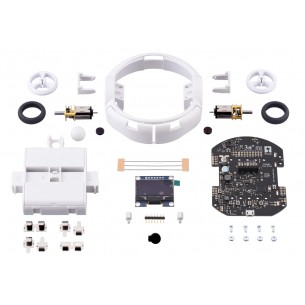
Zestaw akcesoriów do budowy autonomicznego robota wyścigowego w oparciu o popularny minikomputer Raspberry Pi 4. Waveshare PiRacer AI Kit Acce
Zestaw akcesoriów do budowy autonomicznego robota wyścigowego w oparciu o popularny minikomputer Raspberry Pi 4 model B. Zestaw składa się z podwozia wyścigowego, kamery 5MP z sensorem OV5647 oraz niezbędnych dodatków.
Uwaga!
Zestaw nie zawiera zestawu Raspberry Pi 4 model B i karty micro SD. Należy je zakupić oddzielnie. Do zestawu pasują jedynie akumulatory 18650 krótsze niż 67 mm.
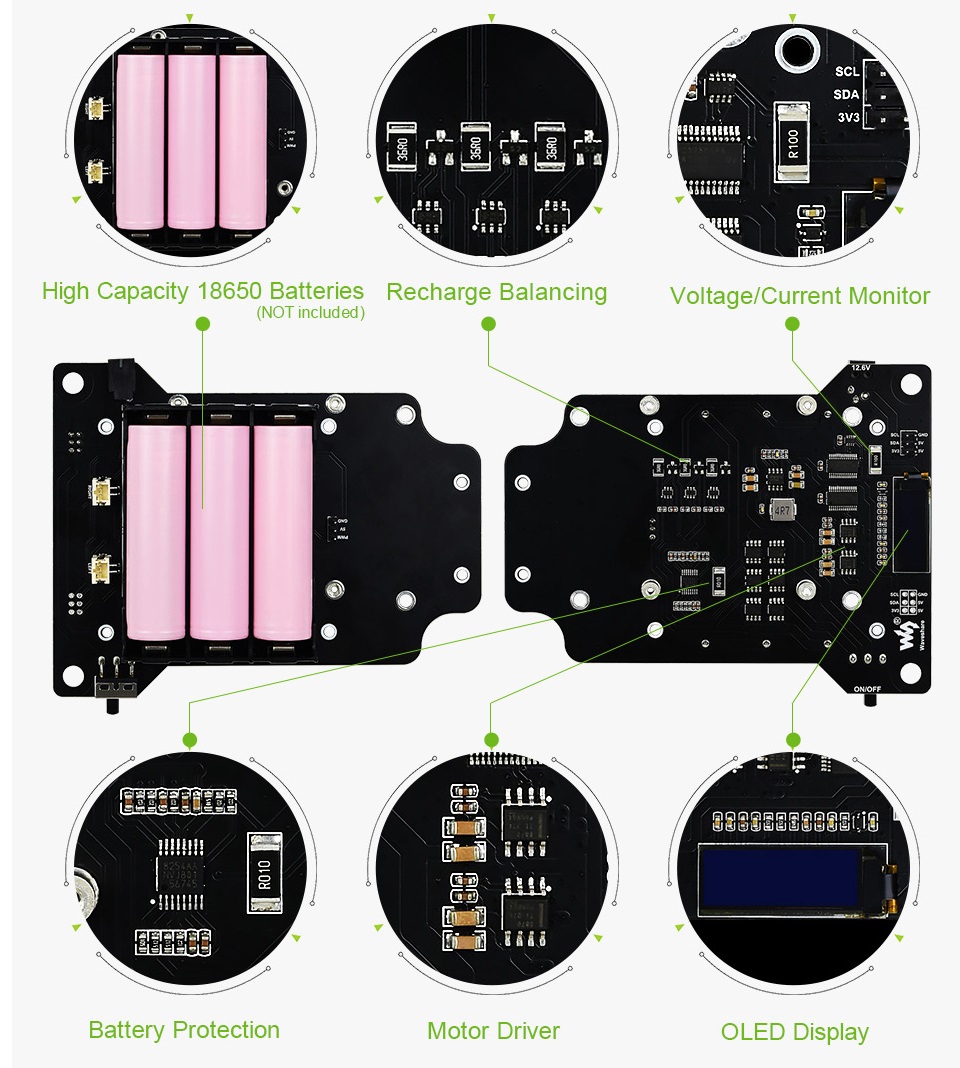
Podwozie to konstrukcja oparta o zasadę Ackermana z silnikiem napędowym z metalową przekładnią o prędkości 740 obr./min oraz przednią osią skrętną z serwomechanizmem MG996R. Szkielet podwozia wykonany został z aluminium. Na płytce rozszerzającej robota znalazł się sterownik silnika, wyświetlacz OLED i obwód zabezpieczający oraz koszyk na 3 ogniwa akumulatorów 18650.
Zestaw może posłużyć do budowy pojazdu autonomicznego lub sterowanego przy pomocy załączonego do zestawu gamepada. Zestaw jest zgodny z bibliotekami TensorFlow, OpenCV, Keras oraz DonkeyCar, czyli platformy wykorzystującej sieci neuronowe i mechanizmy głębokiego uczenia, które przy wsparciu Keras, TensorFlow i OpenCV umożliwia budowę własnego pojazdu autonomicznego.
Pełna dokumentacja oraz instrukcja montażu dostępna jest na stronie Wiki produktu.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Karta microSD z adapterem SD (32 GB, klasa 10) z wgranym systemem Raspberry Pi OS dla Raspberry Pi 5, 4B ,3B+, 3B, 2B, 1B+, 1A+, 400 i Zero 2W
Najnowsza wersja komputera z serii Raspberry Pi: Raspberry Pi 4 model B z czterordzeniowym SoC (Broadcom BCM2711, Cortex-A72) pracującym z częstotliwością 1,8GHz, 2GB pamięci RAM LPDDR4, układ graficzny Broadcom VideoCore VI.
Brak towaru
Długo oczekiwany komputer Raspberry Pi 4 model B z czterordzeniowym układem SoC Broadcom BCM2711 (4 x Cortex-A72) pracującym z taktowaniem 1,8GHz, pamięcią RAM LPDDR4 o pojemności 4 GB i układem graficznym Broadcom VideoCore VI
Długo oczekiwany komputer Raspberry Pi 4 model B z czterordzeniowym układem SoC Broadcom BCM2711 (4 x Cortex-A72) pracującym z taktowaniem 1,8GHz, pamięcią RAM LPDDR4 o pojemności 8 GB i układem graficznym Broadcom VideoCore VI
Akumulator Li-Ion typu 18650 o nominalnym napięciu 3,7 V i pojemności 2500 mAh. Samsung INR18650-25R
Akumulator Li-Ion typu 18650 o nominalnym napięciu 3,6 V i pojemności 3000 mAh. Samsung INR18650-30Q
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja zmontowana. Pololu 4976
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja zmontowana. Pololu 4974
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja do montażu. Pololu 4978
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja do montażu. Pololu 4979
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja do montażu. Pololu 4977
Brak towaru
Kontroler przeznaczony do robota Pololu 3pi+ 32U4. Został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino. Wersja do użytku z wyświetlaczem OLED. Pololu 4973
Sterownik dedykowany do robotów klasy Sumo. Ma wbudowany mikrokontroler ATmega328 i jest komaptybilny ze środowiskiem Arduino IDE. Cytron URC10
Sterownik dedykowany do robotów klasy Mini Sumo. Jest kompatybilny z płytkami Arduino Uno i Arduino Nano. Cytron MAKER-MSUMO
Zestaw akcesoriów do budowy autonomicznego robota wyścigowego w oparciu o popularny zestaw deweloperski NVIDIA Jetson Nano. Waveshare JetRacer Pro 2GB AI Kit Acce
Brak towaru
Zestaw akcesoriów do budowy autonomicznego robota wyścigowego w oparciu o popularny zestaw deweloperski NVIDIA Jetson Nano. Waveshare JetRacer 2GB AI Kit Acce
Brak towaru
Zestaw akcesoriów do budowy wielozadaniowego robota z podwoziem gąsienicowym w oparciu o popularny zestaw deweloperski NVIDIA Jetson Nano. Waveshare JETANK AI Kit Acce
Brak towaru
Zestaw do budowy wielozadaniowego robota z podwoziem gąsienicowym w oparciu o popularny zestaw deweloperski NVIDIA Jetson Nano. Waveshare JETANK AI Kit
Brak towaru
Główna płyta sterująca robota Zumo 32U4 OLED. Jest dołączona jako część zestawu robotów Zumo 32U4 OLED i wbudowana w zmontowane wersje robotów Zumo 32U4 OLED. Dołączone są elementy przewlekane, dyski do enkoderów magnetycznych i elementy montażowe. Pololu 4994
Brak towaru
Zestaw do budowy robota minisumo na podwoziu gąsienicowym. W zestawie jest spychacz, płytka sterująca i zestaw gąsienic. Robot w wersji do samodzielnego montażu, wymaga dodatkowo silników i czterech baterii AA. Pololu 4990
Brak towaru
Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 100:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 4993
Brak towaru
Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 75:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 4992
Brak towaru
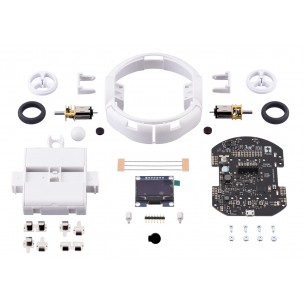
Zestaw akcesoriów do budowy autonomicznego robota wyścigowego w oparciu o popularny minikomputer Raspberry Pi 4. Waveshare PiRacer AI Kit Acce



")
")