333,17 zł Netto
Wielofunkcyjny robot z podwoziem 2WD i kontrolerem w postaci minikomputera Raspberry Pi. Jest uniwersalną platformą mobilną, która może np. śledzić linię lub wyszukiwać i omijać przeszkody. Waveshare AlphaBot2-Pi Acce Pack
AlphaBot2 to zestaw do budowy dwukołowego robota mobilnego w oparciu o minikomputer Raspberry Pi. Dzięki zastosowanym czujnikom spełnia wszystkie funkcję, które są potrzebne początkującym amatorom robotyki: podążanie za linią, omijanie przeszkód, a nawet przetwarzanie obrazów. Zestaw może poruszać się zarówno w trybie autonomicznym, jak i być zdalnie sterowany przez aplikację mobilną i interfejs Bluetooth, WiFi lub pilot IR.

Uwaga!
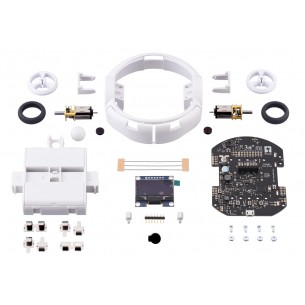
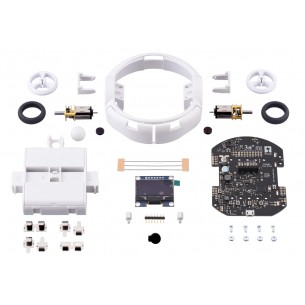
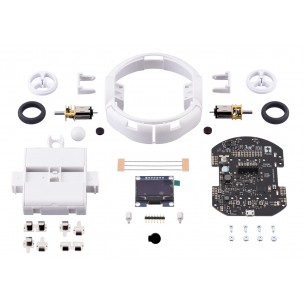
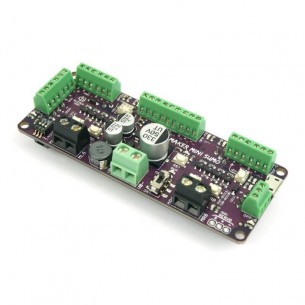
Zestaw nie zawiera minikomputera Raspberry Pi oraz akumulatorów 14500. Należy zakupić je oddzielnie.Zestaw składa się z dwóch płytek: podstawy robota z silnikami oraz płytki adaptera. Podstawa robota wyposażona została w złącza do podłączenia czujnika ultradźwiękowego, czujników linii, czujników do omijania przeszkód oraz LED RGB. Na płytce umieszczono dwukanałowy sterownik silników TB6612FNG, potencjometr do regulacji zakresu wykrywania przeszkód, komparator oraz koszyk na dwie baterie 14500. Do poruszania się robot wykorzystuje dwa silniki N20 z przekładnią 30:1 z kołami oraz dwie kulki podporowe.
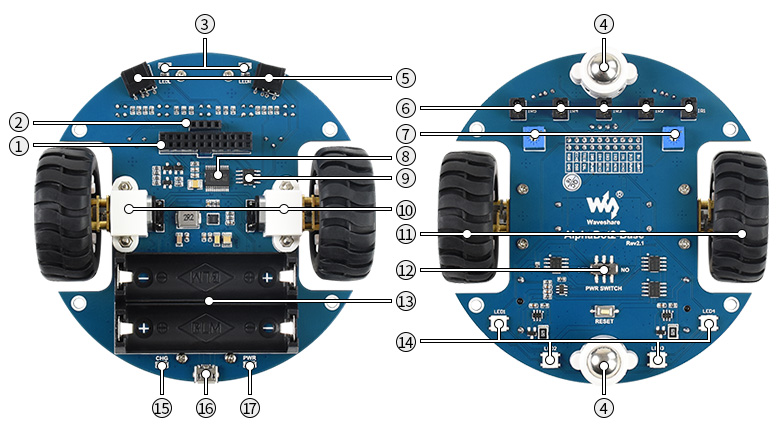
| 1. Złącze AlphaBot2 | 9. Komparator napięcia LM393 |
| 2. Złącze czujnika ultradźwiękowego | 10. Silniki micro N20 |
| 3. Wskaźniki czujników przeszkód | 11. Koła |
| 4. Kulki podporowe Omni | 12. Włącznik zasilania |
| 5. Czujnik odbiciowy przeszkód ST188 | 13. Koszyk akumulatora 14500 |
| 6. Czujnik odbiciowy linii ITR20001/T | 14. LED RGB |
| 7. Potencjometr do regulacji zakresu wykrywania przeszkód | 15. Wskaźnik zasilania |
| 8. Sterownik silników DC TB6612FNG |
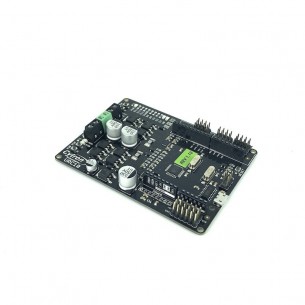
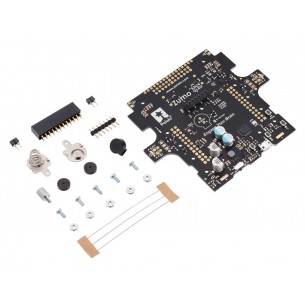
Płytka adaptera wyposażona została w złącze do wpięcia Raspberry Pi, stabilizator napięcia 5 V, sterownik PWM, konwerter ADC, joystick, odbiornik IR oraz buzzer. Do adaptera podłączane są również serwa sterujące ruchem kamery.
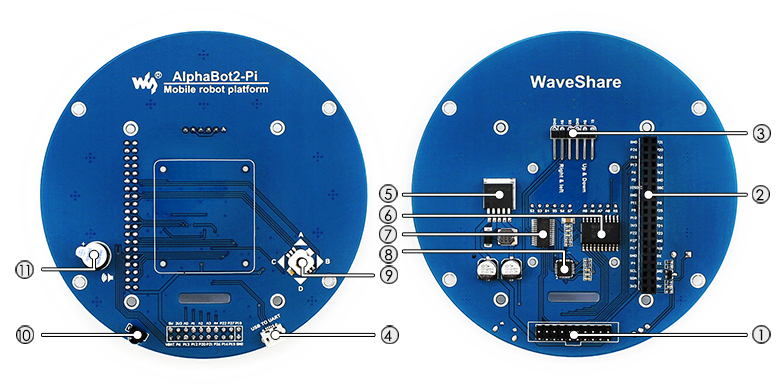
| 1. Złącze do AlphaBot2-Base | 7. Sterownik PWM PCA9685 |
| 2. Złącze Raspberry Pi | 8. Konwerter USB-UART CP2102 |
| 3. Złącze serwa | 9. Joystick |
| 4. Złącze USB | 10. Odbiornik IR |
| 5. Stabilizator 5 V LM2596 | 11. Buzzer |
| 6. Konwerter ADC TLC1543 |
Zestaw jest łatwy w montażu, nie wymaga lutowania. Pełna dokumentacja dostępna jest na stronie Wiki produktu.
AlphaBot2-Base
AlphaBot2-Pi
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Komputer Raspberry Pi 3 model B (Quad Core Broadcom BCM2837, 4x1.2GHz rdzeń ARM Cortex-A53, RAM 1GB, 4xUSB, Ethernet, HDMI, Wifi, Bluetooth)
Komputer Raspberry Pi 3 model B+ (Quad Core Broadcom BCM2837B0, 4x1.4GHz rdzeń ARM Cortex-A53, RAM 1GB, 4xUSB, Ethernet, HDMI, Wi-Fi, Bluetooth BLE)
Najnowsza wersja komputera z serii Raspberry Pi: Raspberry Pi 4 model B z czterordzeniowym SoC (Broadcom BCM2711, Cortex-A72) pracującym z częstotliwością 1,8GHz, 2GB pamięci RAM LPDDR4, układ graficzny Broadcom VideoCore VI.
Brak towaru
Długo oczekiwany komputer Raspberry Pi 4 model B z czterordzeniowym układem SoC Broadcom BCM2711 (4 x Cortex-A72) pracującym z taktowaniem 1,8GHz, pamięcią RAM LPDDR4 o pojemności 4 GB i układem graficznym Broadcom VideoCore VI
Długo oczekiwany komputer Raspberry Pi 4 model B z czterordzeniowym układem SoC Broadcom BCM2711 (4 x Cortex-A72) pracującym z taktowaniem 1,8GHz, pamięcią RAM LPDDR4 o pojemności 8 GB i układem graficznym Broadcom VideoCore VI
Wielofunkcyjny robot z podwoziem 2WD i kontrolerem w postaci płytki Raspberry Pi Pico. Jest uniwersalną platformą mobilną, która może np. śledzić linię lub wyszukiwać i omijać przeszkody. Waveshare PicoGo-EU
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja zmontowana. Pololu 4975
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja zmontowana. Pololu 4976
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja zmontowana. Pololu 4974
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja do montażu. Pololu 4978
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja do montażu. Pololu 4979
Brak towaru
Zmodernizowana wersja popularnego robota mobilnego Pololu 3pi. Robot został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino i wyświetlacz OLED. Wersja do montażu. Pololu 4977
Brak towaru
Kontroler przeznaczony do robota Pololu 3pi+ 32U4. Został oparty o mikrokontroler AVR ATmega32U4 z wgranym bootloaderem Arduino. Wersja do użytku z wyświetlaczem OLED. Pololu 4973
Sterownik dedykowany do robotów klasy Sumo. Ma wbudowany mikrokontroler ATmega328 i jest komaptybilny ze środowiskiem Arduino IDE. Cytron URC10
Sterownik dedykowany do robotów klasy Mini Sumo. Jest kompatybilny z płytkami Arduino Uno i Arduino Nano. Cytron MAKER-MSUMO
Zestaw akcesoriów do budowy autonomicznego robota wyścigowego w oparciu o popularny zestaw deweloperski NVIDIA Jetson Nano. Waveshare JetRacer Pro 2GB AI Kit Acce
Brak towaru
Zestaw akcesoriów do budowy autonomicznego robota wyścigowego w oparciu o popularny zestaw deweloperski NVIDIA Jetson Nano. Waveshare JetRacer 2GB AI Kit Acce
Brak towaru
Zestaw akcesoriów do budowy wielozadaniowego robota z podwoziem gąsienicowym w oparciu o popularny zestaw deweloperski NVIDIA Jetson Nano. Waveshare JETANK AI Kit Acce
Brak towaru
Zestaw do budowy wielozadaniowego robota z podwoziem gąsienicowym w oparciu o popularny zestaw deweloperski NVIDIA Jetson Nano. Waveshare JETANK AI Kit
Brak towaru
Główna płyta sterująca robota Zumo 32U4 OLED. Jest dołączona jako część zestawu robotów Zumo 32U4 OLED i wbudowana w zmontowane wersje robotów Zumo 32U4 OLED. Dołączone są elementy przewlekane, dyski do enkoderów magnetycznych i elementy montażowe. Pololu 4994
Brak towaru
Zestaw do budowy robota minisumo na podwoziu gąsienicowym. W zestawie jest spychacz, płytka sterująca i zestaw gąsienic. Robot w wersji do samodzielnego montażu, wymaga dodatkowo silników i czterech baterii AA. Pololu 4990
Brak towaru
Wielofunkcyjny robot z podwoziem 2WD i kontrolerem w postaci minikomputera Raspberry Pi. Jest uniwersalną platformą mobilną, która może np. śledzić linię lub wyszukiwać i omijać przeszkody. Waveshare AlphaBot2-Pi Acce Pack