

















146,18 zł Netto
Silnik o średnicy 25 mm i długości 50 mm, z metalową przekładnią 20,4:1, napięciem pracy 6 V, poborem prądu od 0,55 A do 6,5 A, prędkością 460 RPM i maksymalnym momentem obrotowym 5,5 kg*cm. Pololu 1572
Silnik o średnicy 25 mm i długości 50 mm, wyposażony w metalową przekładnię 20,4:1 z wałem w kształcie litery „D” o średnicy 4 mm i długości ok. 10 mm. Zalecanym napięciem pracy silnika jest 6 V i przy takim napięciu osiąga on prędkość 460 RPM oraz maksymalny moment obrotowy 5,5 kg*cm, pobierając prąd od 0,55 A do 6,5 A.
Uwaga!
Przeciążenie silnika może spowodować zniszczenie przekładni lub skrócenie jego żywotności. Zaleca się nie przekraczać obciążenia 15 kg*cm. Nie należy doprowadzać do zablokowania wału silnika, gdyż może to spowodować uszkodzenie przekładni lub przegrzanie silnika. Zaleca się zasilanie silników prądem równym bądź mniejszym niż 25% podanego prądu maksymalnego.Silniki Pololu 25D dostępne są w dwóch wersjach o zalecanym napięciu 6 V i 12 V. Silniki te różnią się mocą, oraz pobieranym prądem. Moc silników LP w wersjach 6 V i 12 V różni się nieznaczne, a prąd pobierany przez silniki 12 V LP jest o ponad połowę mniejszy, niż prąd pobierany przez silniki 6 V LP. Moc silników HP 12 V jest zauważalnie większa niż HP 6 V, przez co różnica w pobieranym prądzie nie jest aż tak duża jak w silnikach LP. Możliwe jest zasilanie silników mniejszym lub większym napięciem, ale wiąże się to odpowiednio z mniejszą mocą lub skróceniem żywotności silników.
Wszystkie silniki mają jednakowe wymiary. Przekładnie w zależności od przełożenia różnią się długością, co widać na poniższym rysunku technicznym. Metalowa obudowa przekładni ma dwa otwory gwintowane dla śrub M3. Silniki z przekładnią ważą od 60 g do 110 g w zależności od wielkości przekładni.
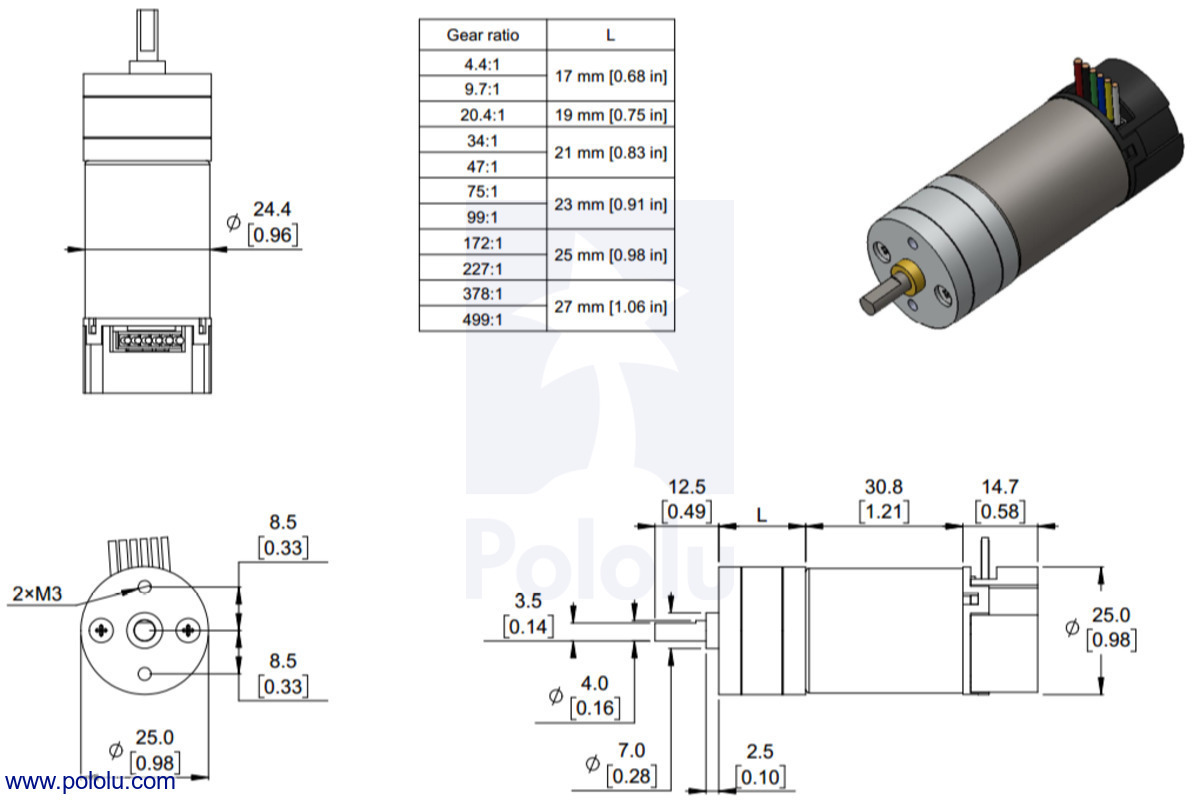 |
| Wymiary silników 25D w wersji z enkoderami (jednostki w mm). |
|---|
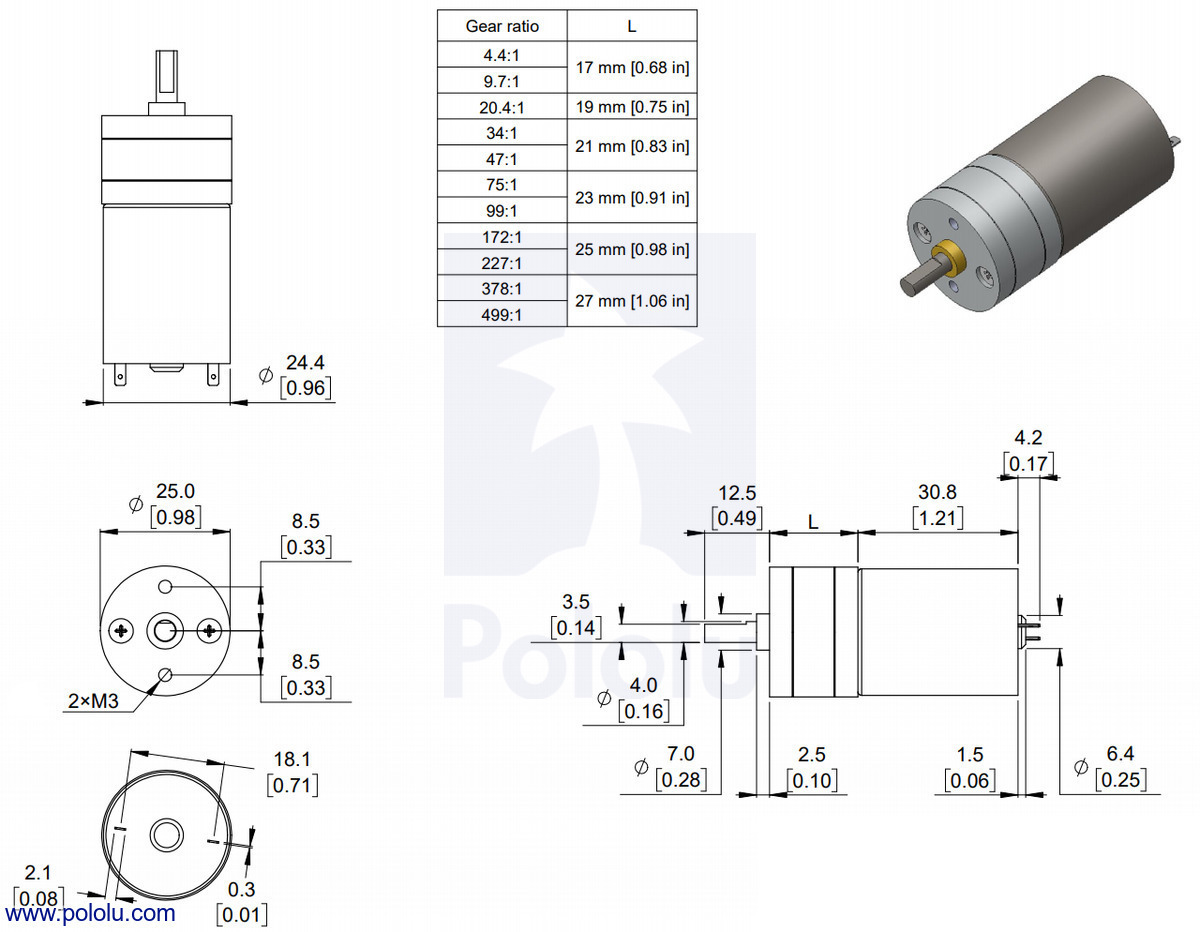 |
| Wymiary silników 25D w wersji bez enkoderów (jednostki w mm). |
Uwaga!
Nie należy wkręcać zbyt głęboko śrub w otwory montażowe, gdyż może to doprowadzić do uszkodzenia przekładni. Zaleca się nie wkręcać śrub głębiej niż 6 mm.Wszystkie silniki Pololu 25D z przekładnią dostępne są w wersjach z enkoderem magnetycznym oraz bez enkodera. Enkoder zamontowany jest na dodatkowym wale znajdującym się po przeciwnej stronie wału głównego. Wał na którym zamontowany jest enkoder wyprowadzony jest bezpośrednio z silnika (bez przełożenia), co umożliwia montaż enkodera działającego znacznie dokładniej, niż gdyby był zamontowany na wale za przekładnią. Zastosowanie enkodera pozwala określić prędkość oraz położenie wału silnika oraz zastosować te wartości w pętli zwrotniej regulatora PID.
 |
 |
 |
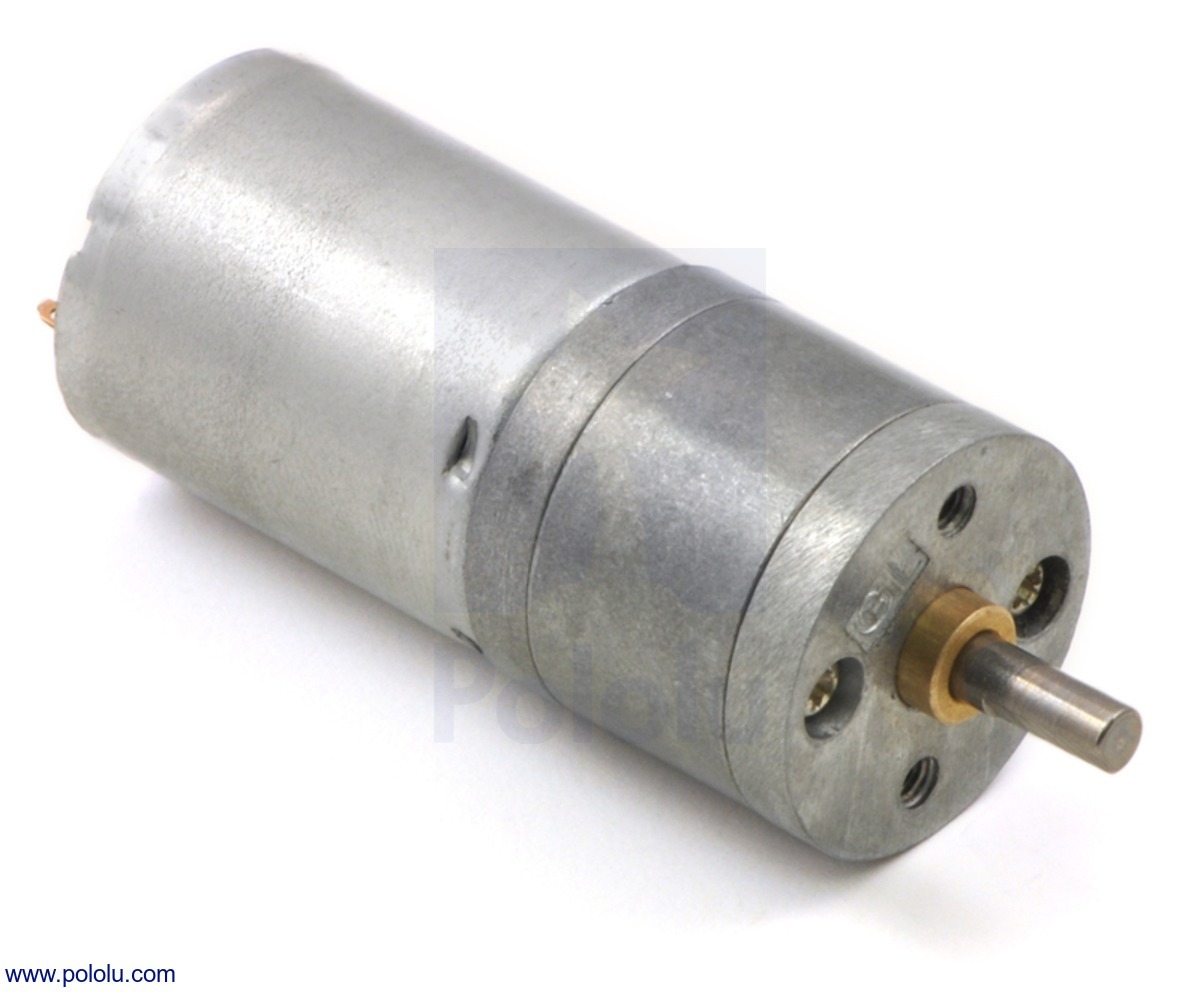
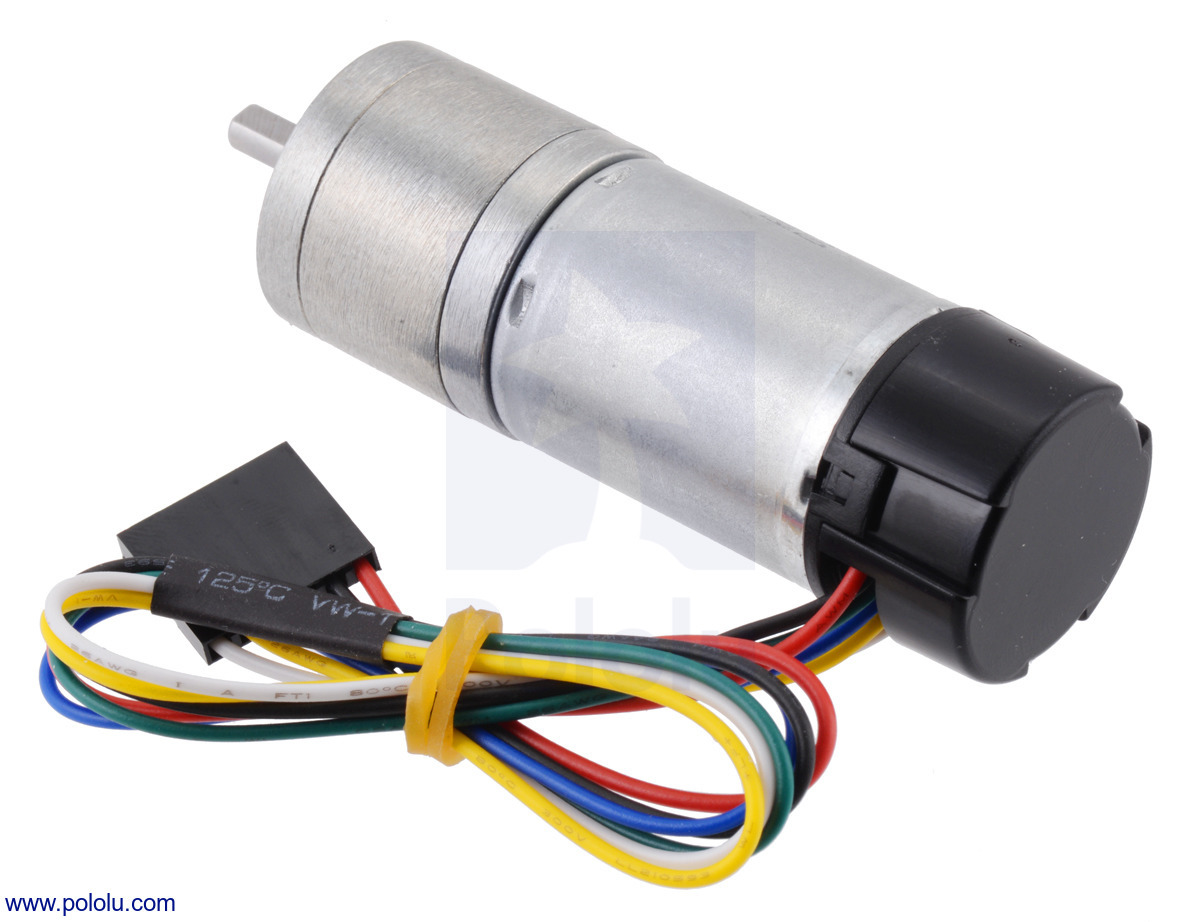
| Silnik z jednostronnym wałem | Silnik z obustronnym wałem i zamontowanym enkoderem |
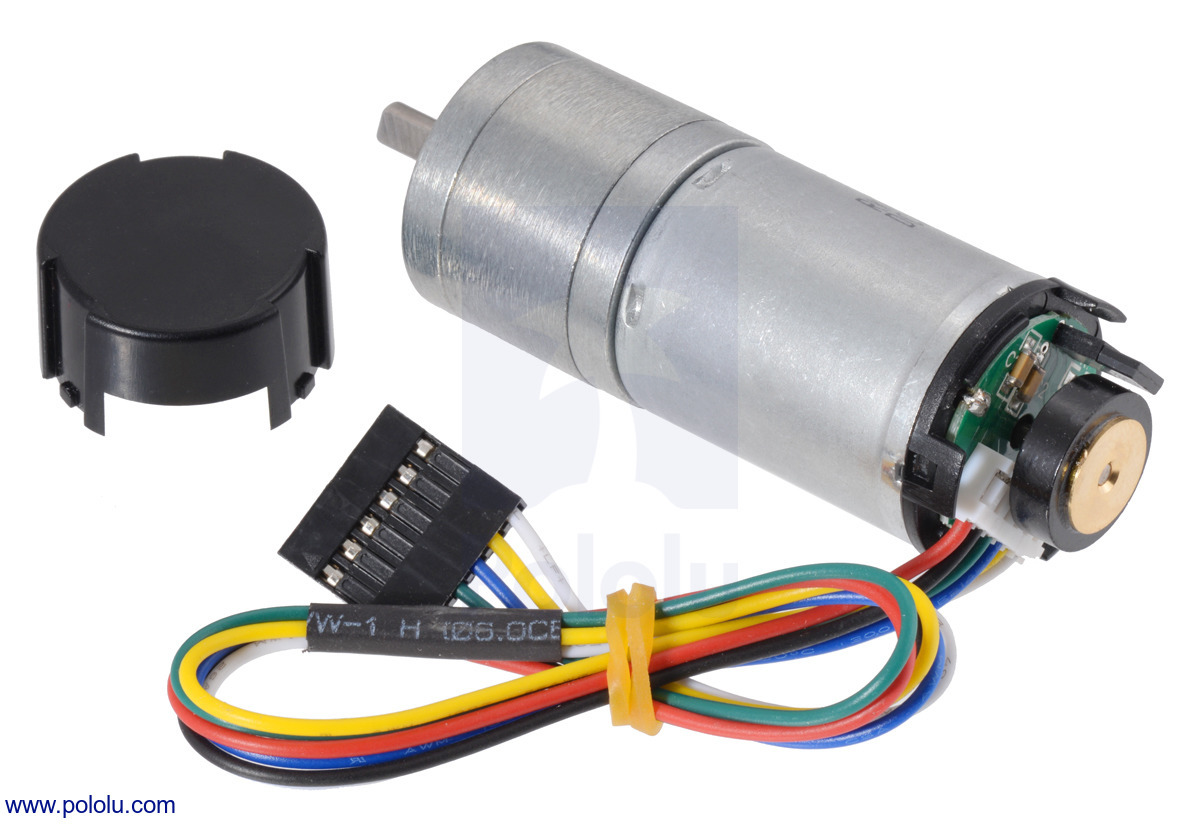
Silnik z obustronnym wałem i zamontowanym enkoderem oraz zdjętą plastikową osłonką |
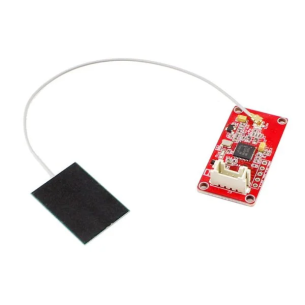
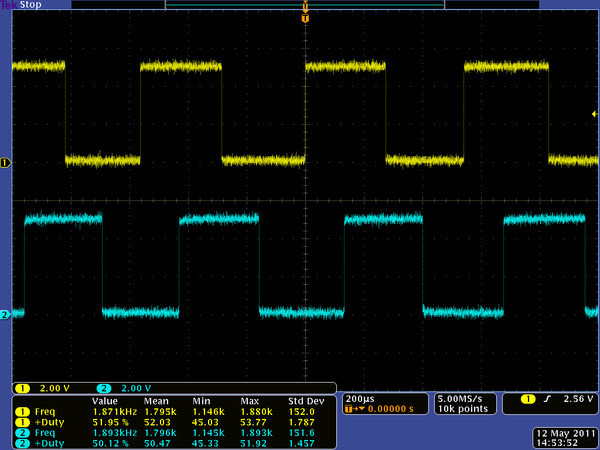
Dwukanałowy enkoder magnetyczny oparty o efekt Halla służy do wykrywania obrotu dysku magnetycznego, zamontowanego na dodatkowym wale silnika. Zastosowany enkoder pozwala uzyskać rozdzielczość maksymalnie 48 CPR, przy zliczaniu sygnału z obu kanałów enkodera, oraz uwzględniając zbocze rosnące oraz opadające sygnału. Aby obliczyć ile impulsów przypada na jeden obrót wału głównego silnika, należy pomnożyć jego przełożenie przez 48. Do silników z enkoderem dołączony jest sześciożyłowy przewód służący do zasilania silnika i enkoderów oraz przekazywania sygnału zwrotnego z enkodera. Funkcje poszczególnych przewodów zostały opisane w tabeli poniżej. Czujniki enkodera mogą być zasilane napięciem od 3,5 V do 20 V i pobierają prąd o natężeniu maksymalnie 10 mA.
|
 |
||||||||||||||
| Wykres sygnału zworotnego enkodera z obu kanałów |
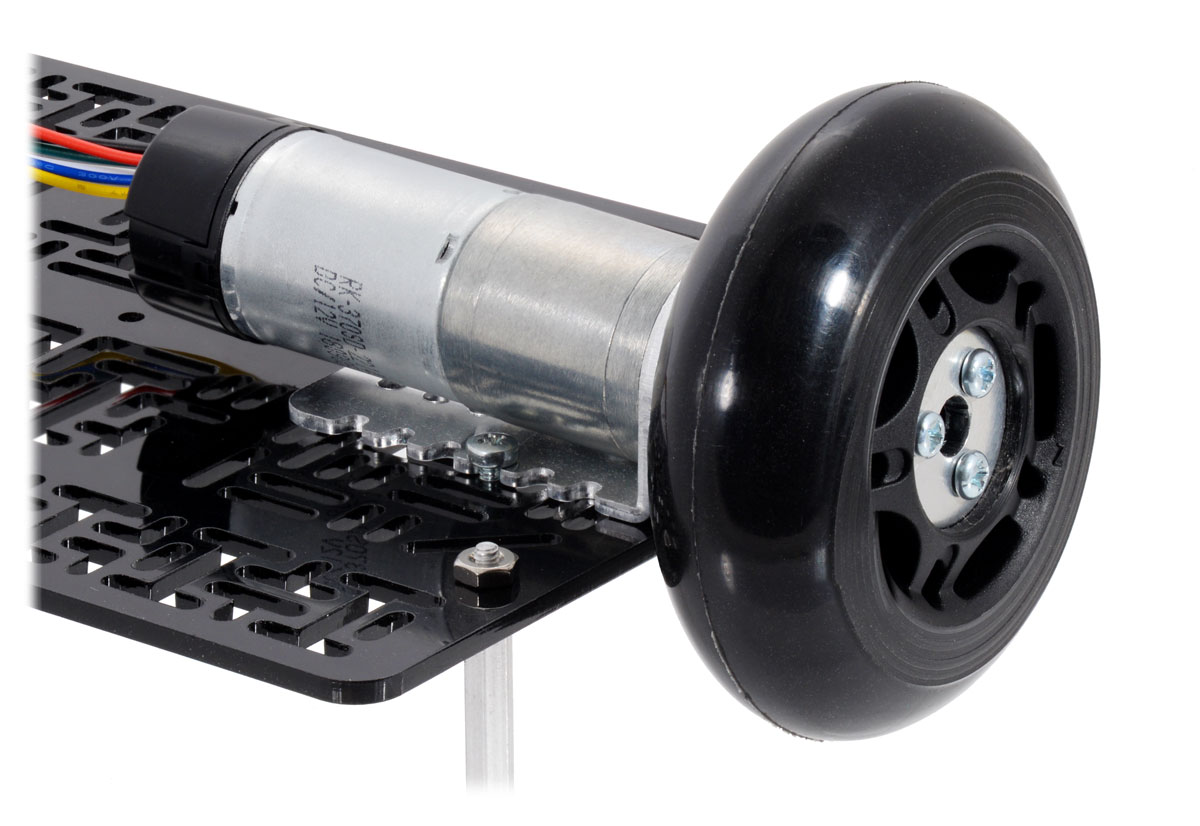
W naszej ofercie można znaleźć koła pasujące do silników z wałem o średnicy 4 mm i kształcie litery „D”. Dostępne są wąskie koła, koła terenowe oraz koła Scooter o różnych średnicach.
 |
 |
 |
| Czarne koła Pololu 80x10mm | Białe koła Pololu 80x10mm | Czarne koło Pololu 80x10mm z zamontowanym silnikiem |
|
|
 |
|
| Koła Wild Thumper chromowane | Koła Wild Thumper czerwony matalic | Koło Wild Thumper z zamontowanym silnikiem |
 |
 |
|
| Zestawienie kół Pololu Scooter z poliuretanu o różnych średnicach | Adaptery do kół Scooter | |
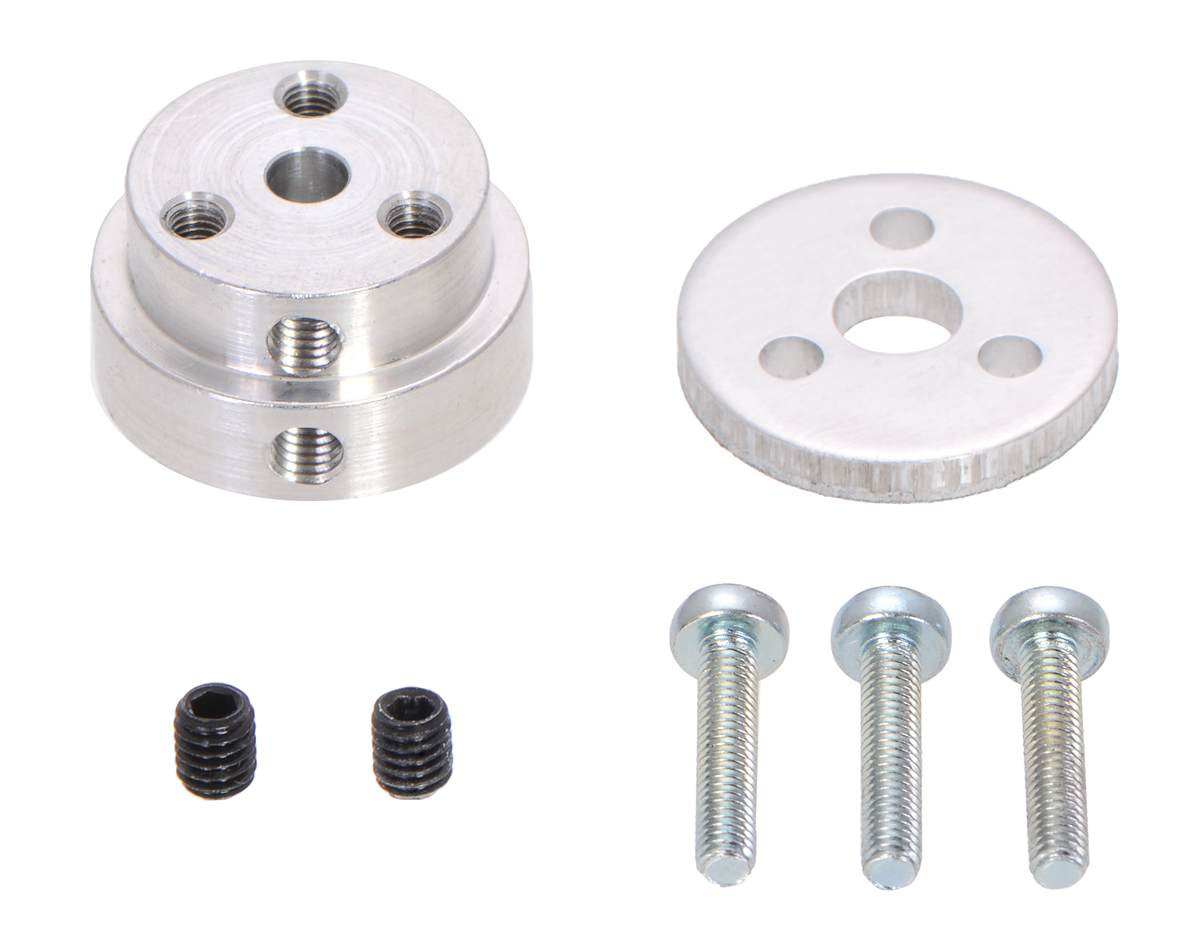
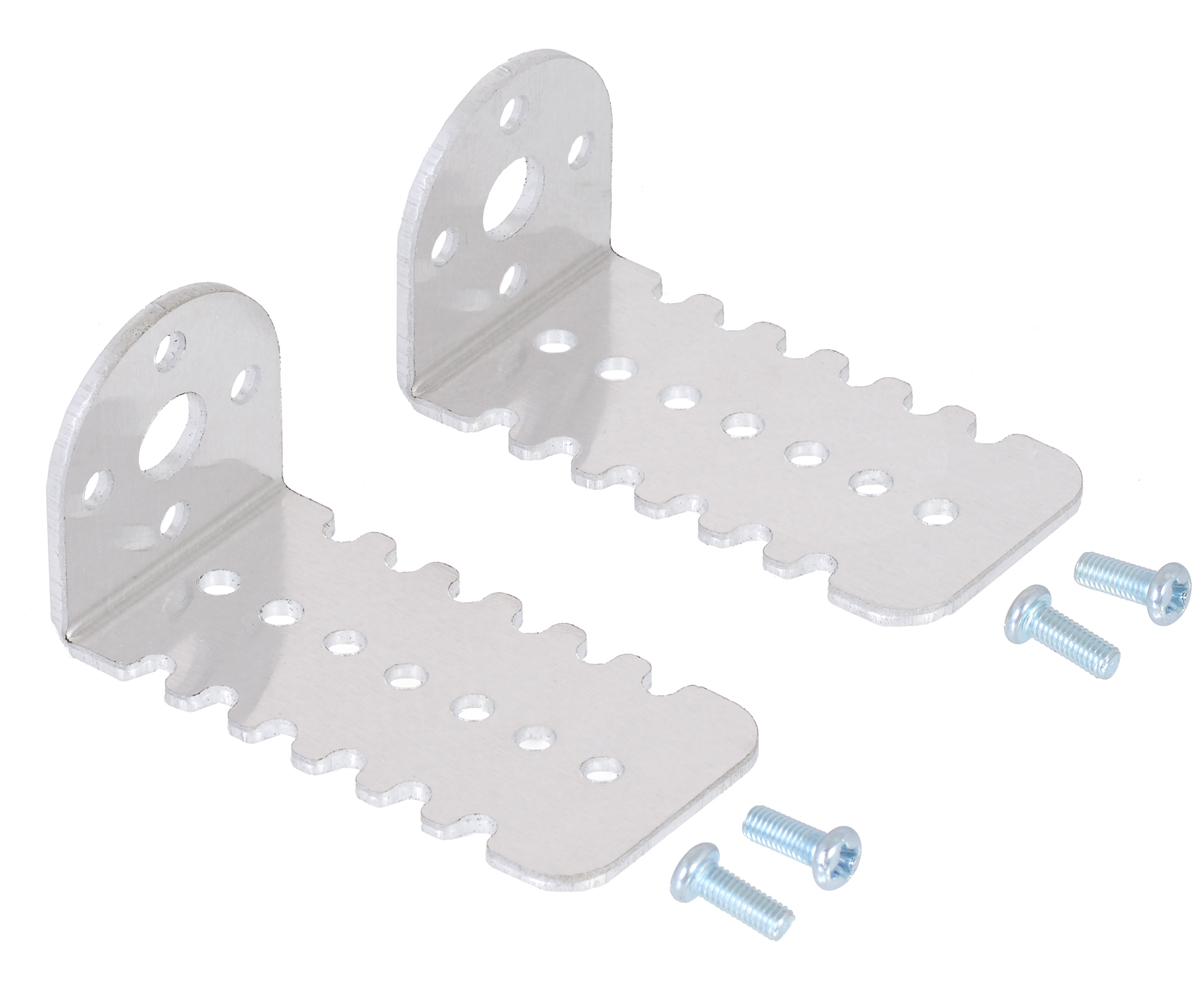
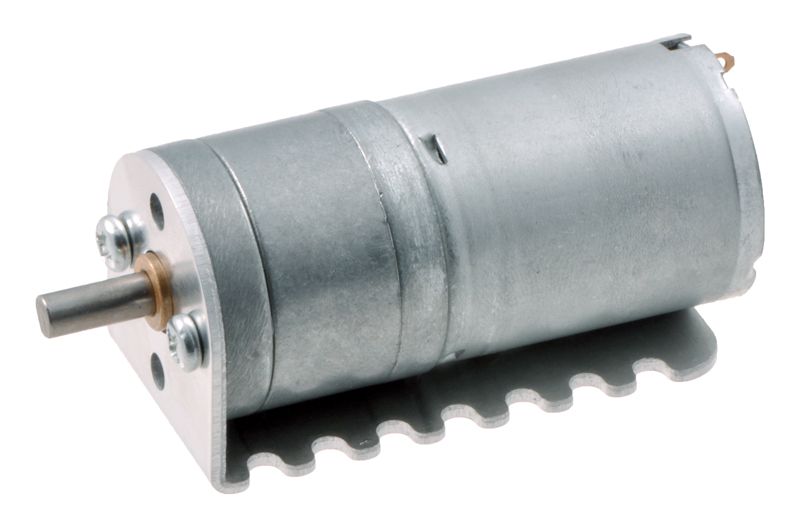
Metalowe uchwyty pasujące do silników Pololu 25D, znacznie ułatwiają ich montaż.
 |
 |
 |
| Uchwyty do silników 25D | Silnik 25D z zamontowanym uchwytem oraz adapterem | Silnik 25D zamontowany na platformie z kołem typu Scooter |
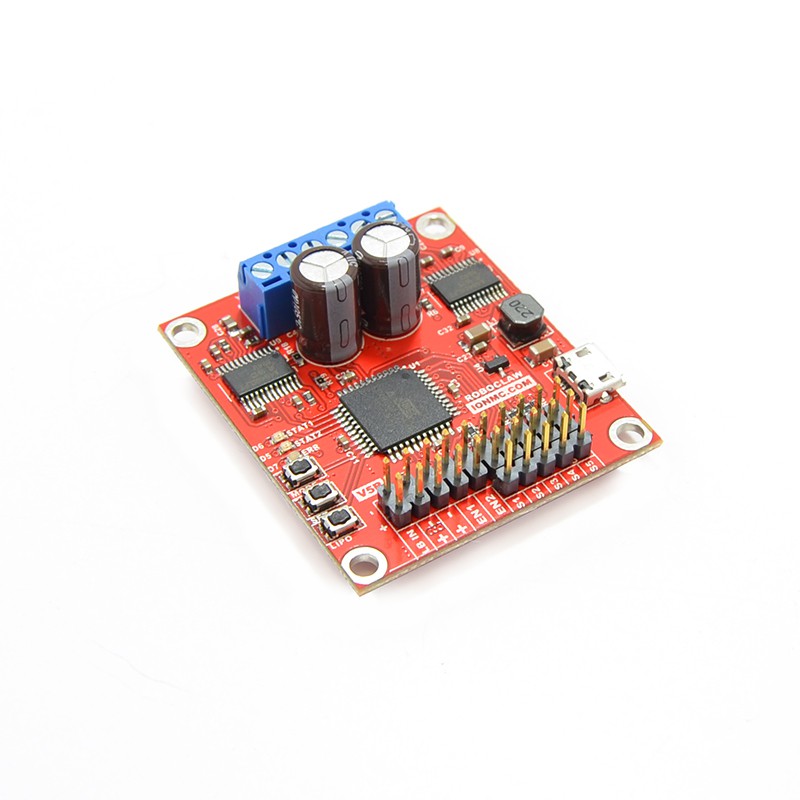
Sterownie silnikami bezpośrednio z portów mikrokontrolera nie jest możliwe, ze względu na duży pobór prądu. Problem ten rozwiązują sterowniki silników. Dzięki sterownikom możliwe jest nie tylko włączanie i wyłącznie silników, ale również sterowanie ich prędkością oraz kierunkiem obrotów.
W naszej ofercie można znaleźć szereg sterowników dla jednego lub dwóch silników. Sterowniki dostępne są w formie modułów oraz rozszerzeń shield dla Arduino i Raspberry Pi.
 |
 |
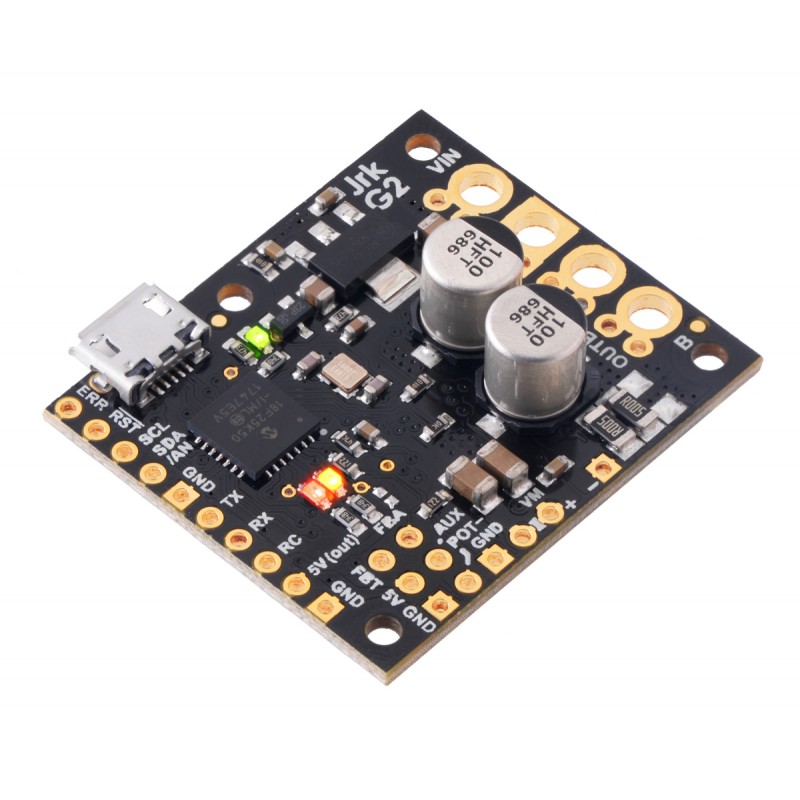 |
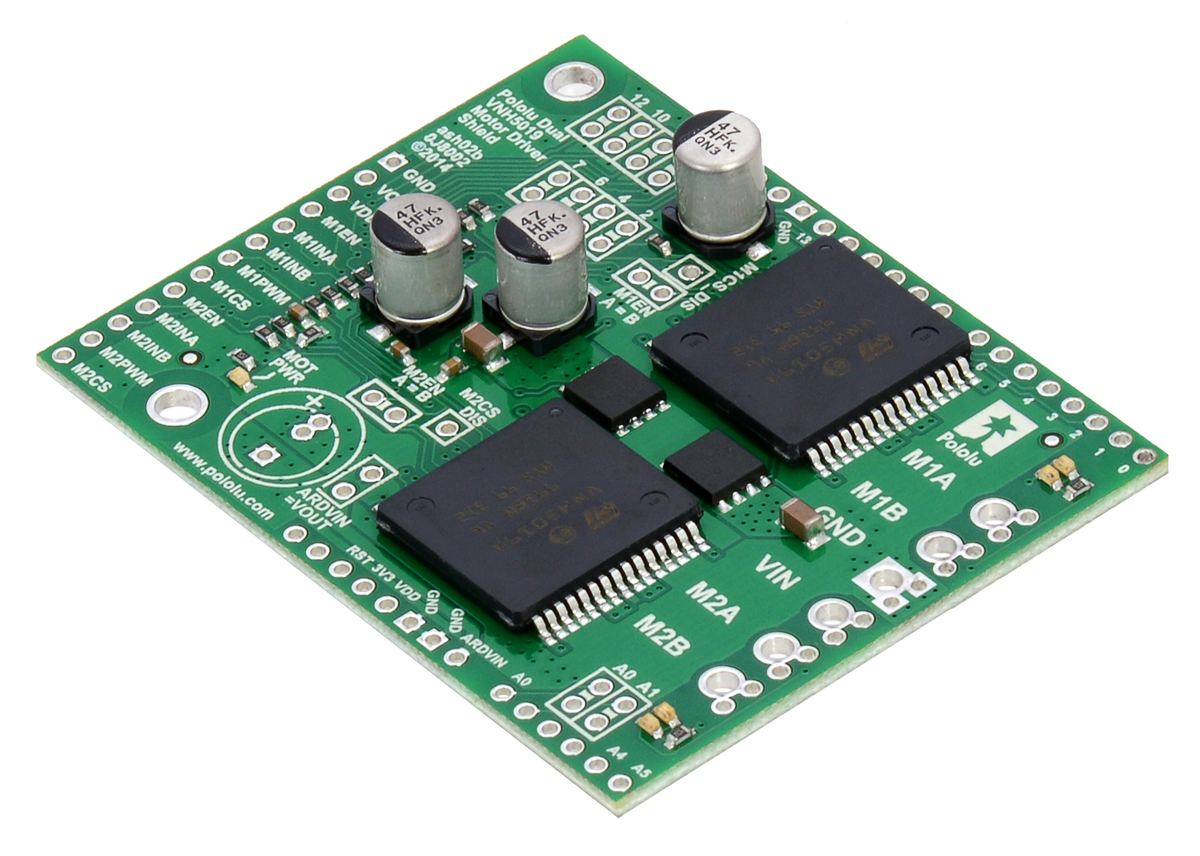
| RoboClaw 2x7A Motor Controller (V5B)- dwukanałowy sterownik silników DC | Shield Arduino z podwójnym sterownikiem silników DC z układem VNH5019 | Jrk G2 21v3 sterownik silnika DC z komunikacją USB |
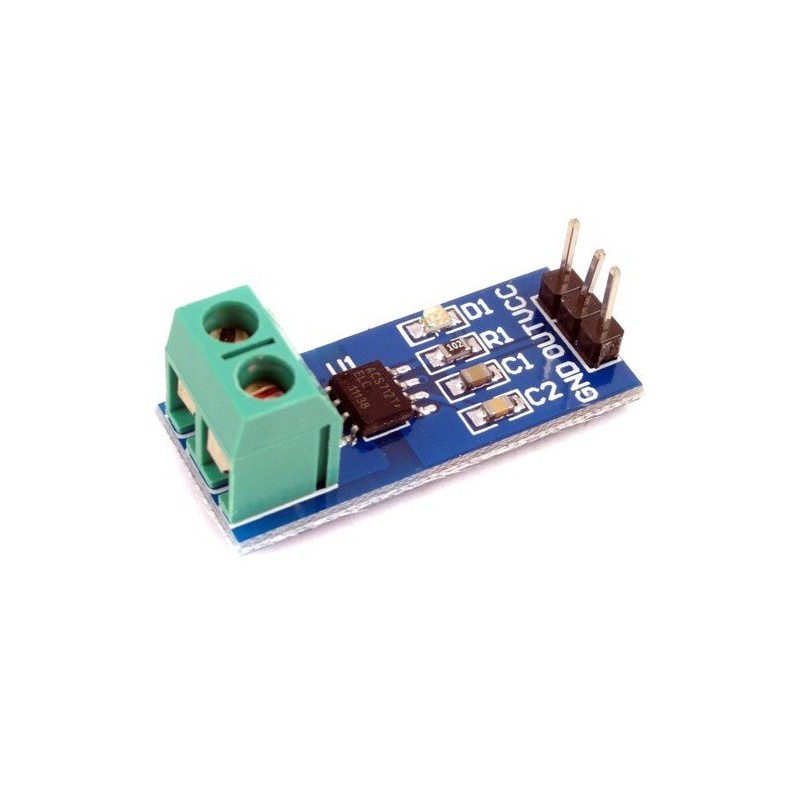
Czujniki prądu pozwalają zmierzyć, ile prądu w danej chwili pobierają silniki, co pozwala określić obciążenie silników. W naszej ofercie znajdują się czujniki z zakresami pomiarowymi od ±5 do ±75.
 |
 |
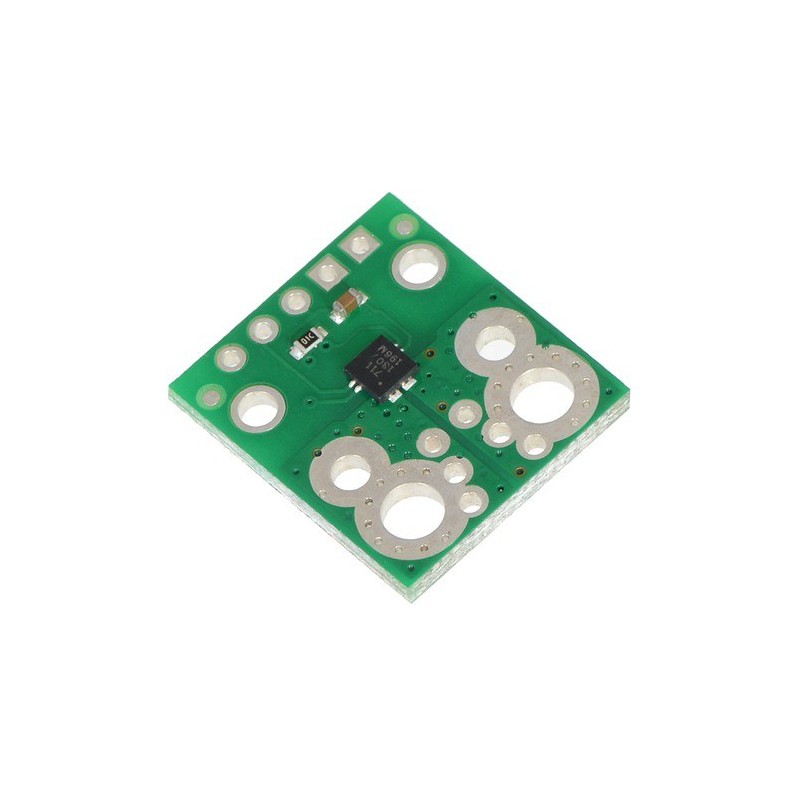 |
| Moduł czujnika natężenia prądu 0-20A z układem ACS712-20 | ACHS-7124 – czujnik natężenia prądu ±40A | Moduł czujnika natężenia prądu ±15,5A z układem ACS711EX |
W naszej ofercie można znaleźć silniki z przekładniami o przełożeniach od 4,4:1 do 499:1, o napięciu znamionowym 6 V oraz 12 V. Wszystkie warianty silników z przekładniami są dostępne w wersji z enkoderem magnetycznym oraz bez enkodera. Dodatkowo dostępne są silniki z enkoderami bez przekładni, pasujące do przekładni od pozostałych silników 25D.
| Przekładnia | Wersja | Napięcie | Prędkość obrotowa | max. moment obrotowy | min. prąd | max. prąd | Jeden wał | Dwa wały |
|---|---|---|---|---|---|---|---|---|
| 1:1 | HP | 12 V | 10 200 RPM | 0,4 kg*cm | 0,3 A | 5,6 A | LINK | |
| 6 V | 10 000 RPM | 0,35 kg*cm | 0,275 A | 6,5 A | LINK | |||
| MP | 12 V | 7 800 RPM | 0,2 kg*cm | 0,2 A | 2,1 A | LINK | ||
| LP | 12V | 5 600 RPM | 0,15 kg*cm | 0,1 A | 1,1 A | LINK | ||
| 6 V | 6 200 RPM | 0,15 kg*cm | 0,25 A | 2,4 A | LINK | |||
| 4,4:1 | HP | 12 V | 2 250 RPM | 1,7 kg*cm | 0,3 A | 5,6 A | LINK | LINK |
| 6 V | 2 150 RPM | 1,5 kg*cm | 0,275 A | 6,5 A | LINK | LINK | ||
| MP | 12 V | 1 700 RPM | 0,8 kg*cm | 0,2 A | 2,1 A | LINK | LINK | |
| LP | 12 V | 1 200 RPM | 0,6 kg*cm | 0,1 A | 1,1 A | LINK | LINK | |
| 6 V | 1 300 RPM | 0,6 kg*cm | 0,25 A | 2,4 A | LINK | LINK | ||
| 9,7:1 | HP | 12 V | 1 030 RPM | 3,2 kg*cm | 0,3 A | 5,6 A | LINK | LINK |
| 6 V | 990 RPM | 2,8 kg*cm | 0,275 A | 6,5 A | LINK | LINK | ||
| MP | 12 V | 1 030 RPM | 1,6 kg*cm | 0,2 A | 2,1 A | LINK | LINK | |
| LP | 12 V | 560 RPM | 1 kg*cm | 0,1 A | 1,1 A | LINK | LINK | |
| 6 V | 590 RPM | 1,2 kg*cm | 0,25 A | 2,4 A | LINK | LINK | ||
| 20,4:1 | HP | 12 V | 500 RPM | 6 kg*cm | 0,3 A | 5,6 A | LINK | LINK |
| 6 V | 460 RPM | 5,5 kg*cm | 0,275 A | 6,5 A | LINK | LINK | ||
| MP | 12 V | 370 RPM | 3 kg*cm | 0,2 A | 2,1 A | LINK | LINK | |
| LP | 12 V | 260 RPM | 2 kg*cm | 0,1 A | 1,1 A | LINK | LINK | |
| 6 V | 290 RPM | 2,4 kg*cm | 0,25 A | 2,4 A | LINK | LINK | ||
| 34:1 | HP | 12 V | 290 RPM | 8,5 kg*cm | 0,3 A | 5,6 A | LINK | LINK |
| 6 V | 280 RPM | 6,5 kg*cm | 0,275 A | 6,5 A | LINK | LINK | ||
| MP | 12 V | 220 RPM | 4,5 kg*cm | 0,2 A | 2,1 A | LINK | LINK | |
| LP | 12 V | 150 RPM | 3 kg*cm | 0,1 A | 1,1 A | LINK | LINK | |
| 6 V | 170 RPM | 3,5 kg*cm | 0,25 A | 2,4 A | LINK | LINK | ||
| 47:1 | HP | 12 V | 210 RPM | 12 kg*cm | 0,3 A | 5,6 A | LINK | LINK |
| 6 V | 200 RPM | 8,5 kg*cm | 0,275 A | 6,5 A | LINK | LINK | ||
| MP | 12 V | 160 RPM | 6 kg*cm | 0,2 A | 2,1 A | LINK | LINK | |
| LP | 12 V | 110 RPM | 4,3 kg*cm | 0,1 A | 1,1 A | LINK | LINK | |
| 6 V | 120 RPM | 4,7 kg*cm | 0,25 A | 2,4 A | LINK | LINK | ||
| 75:1 | HP | 12 V | 130 RPM | 17 kg*cm | 0,3 A | 5,6 A | LINK | LINK |
| 6 V | 130 RPM | 11 kg*cm | 0,275 A | 6,5 A | LINK | LINK | ||
| MP | 12 V | 100 RPM | 9 kg*cm | 0,2 A | 2,1 A | LINK | LINK | |
| LP | 12 V | 71 RPM | 6 kg*cm | 0,1 A | 1,1 A | LINK | LINK | |
| 6 V | 78 RPM | 6,8 kg*cm | 0,25 A | 2,4 A | LINK | LINK | ||
| 99:1 | HP | 12 V | 100 RPM | 21 kg*cm | 0,3 A | 5,6 A | LINK | LINK |
| 6 V | 97 RPM | 15 kg*cm | 0,275 A | 6,5 A | LINK | LINK | ||
| MP | 12 V | 76 RPM | 12 kg*cm | 0,2 A | 2,1 A | LINK | LINK | |
| LP | 12 V | 55 RPM | 8 kg*cm | 0,1 A | 1,1 A | LINK | LINK | |
| 6 V | 58 RPM | 9,4 kg*cm | 0,25 A | 2,4 A | LINK | LINK | ||
| 172:1 | HP | 6 V | 56 RPM | 25 kg*cm | 0,275 A | 6,5 A | LINK | LINK |
| MP | 12 V | 43 RPM | 18 kg*cm | 0,2 A | 2,1 A | LINK | LINK | |
| LP | 12 V | 31 RPM | 13 kg*cm | 0,1 A | 1,1 A | LINK | LINK | |
| 6 V | 34 RPM | 14,5 kg*cm | 0,25 A | 2,4 A | LINK | LINK | ||
| 227:1 | MP | 12 V | 33 RPM | 23 kg*cm | 0,2 A | 2,1 A | LINK | LINK |
| LP | 12 V | 23 RPM | 17 kg*cm | 0,1 A | 1,1 A | LINK | LINK | |
| 6 V | 25 RPM | 16 kg*cm | 0,25 A | 1,5 A | LINK | LINK | ||
| 378:1 | LP | 12 V | 14 RPM | 23 kg*cm | 0,1 A | 1,6 A | LINK | LINK |
| 6 V | 15 RPM | 22 kg*cm | 0,25 A | 1,1 A | LINK | LINK | ||
| 499:1 | LP | 6 V | 11 RPM | 30 kg*cm | 0,25 A | 2,4 A | LINK | LINK |
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Silnik o średnicy 25 mm i długości 63 mm, z metalową przekładnią 9,7:1, napięciem pracy 12 V, poborem prądu od 0,1 A do 1,1 A, prędkością 560 RPM, maksymalnym momentem obrotowym 1 kg*cm i enkoderem magnetycznym 48 CPR. Pololu 4882
Brak towaru
Silnik o średnicy 25 mm i długości 65 mm, z metalową przekładnią 20,4:1, napięciem pracy 12 V, poborem prądu od 0,1 A do 1,1 A, prędkością 260 RPM, maksymalnym momentem obrotowym 2 kg*cm i enkoderem magnetycznym 48 CPR. Pololu 4883
Brak towaru
Silnik o średnicy 25 mm i długości 67 mm, z metalową przekładnią 34:1, napięciem pracy 12 V, poborem prądu od 0,1 A do 1,1 A, prędkością 150 RPM, maksymalnym momentem obrotowym 3 kg*cm i enkoderem magnetycznym 48 CPR. Pololu 4884
Brak towaru
Silnik o średnicy 25 mm i długości 67 mm, z metalową przekładnią 47:1, napięciem pracy 12 V, poborem prądu od 0,1 A do 1,1 A, prędkością 110 RPM, maksymalnym momentem obrotowym 4,3 kg*cm i enkoderem magnetycznym 48 CPR. Pololu 4885
Brak towaru
Silnik o średnicy 25 mm i długości 69 mm, z metalową przekładnią 75:1, napięciem pracy 12 V, poborem prądu od 0,1 A do 1,1 A, prędkością 71 RPM, maksymalnym momentem obrotowym 6 kg*cm i enkoderem magnetycznym 48 CPR. Pololu 4886
Brak towaru
Silnik o średnicy 25 mm i długości 69 mm, z metalową przekładnią 99:1, napięciem pracy 12 V, poborem prądu od 0,1 A do 1,1 A, prędkością 55 RPM, maksymalnym momentem obrotowym 8 kg*cm i enkoderem magnetycznym 48 CPR. Pololu 4887
Brak towaru
Silnik o średnicy 25 mm i długości 71 mm, z metalową przekładnią 172:1, napięciem pracy 12 V, poborem prądu od 0,1 A do 1,1 A, prędkością 31 RPM, maksymalnym momentem obrotowym 13 kg*cm i enkoderem magnetycznym 48 CPR. Pololu 4888
Brak towaru
Silnik o średnicy 25 mm i długości 71 mm, z metalową przekładnią 227:1, napięciem pracy 12 V, poborem prądu od 0,1 A do 1,1 A, prędkością 23 RPM, maksymalnym momentem obrotowym 17 kg*cm i enkoderem magnetycznym 48 CPR. Pololu 4889
Brak towaru
Silnik o średnicy 25 mm i długości 73 mm, z metalową przekładnią 378:1, napięciem pracy 12 V, poborem prądu od 0,1 A do 1,1 A, prędkością 14 RPM, maksymalnym momentem obrotowym 23 kg*cm i enkoderem magnetycznym 48 CPR. Pololu 4890
Brak towaru
Silnik o średnicy 25 mm i długości 48 mm, z metalową przekładnią 4,4:1, napięciem pracy 12 V , poborem prądu od 0,02 A do 1,1 A, prędkością 1200 RPM i maksymalnym momentem obrotowym 0,6 kg*cm. Pololu 3249
Brak towaru
Silnik o średnicy 25 mm i długości 48 mm, z metalową przekładnią 9,7:1, napięciem pracy 12 V , poborem prądu od 0,1 A do 1,1 A, prędkością 560 RPM i maksymalnym momentem obrotowym 1 kg*cm. Pololu 3250
Brak towaru
Silnik o średnicy 25 mm i długości 50 mm, z metalową przekładnią 20,4:1, napięciem pracy 12 V, poborem prądu od 0,1 A do 1,1 A, prędkością 260 RPM i maksymalnym momentem obrotowym 2 kg*cm. Pololu 3251
Brak towaru
Silnik o średnicy 25 mm i długości 52 mm, z metalową przekładnią 34:1, napięciem pracy 12 V, poborem prądu od 0,1 A do 1,1 A, prędkością 150 RPM i maksymalnym momentem obrotowym 3 kg*cm. Pololu 3252
Brak towaru
Silnik o średnicy 25 mm i długości 52 mm, z metalową przekładnią 47:1, napięciem pracy 12 V, poborem prądu od 0,1 A do 1,1 A, prędkością 110 RPM i maksymalnym momentem obrotowym 4,3 kg*cm. Pololu 3253
Brak towaru
Silnik o średnicy 25 mm i długości 54 mm, z metalową przekładnią 75:1, napięciem pracy 12 V, poborem prądu od 0,1 A do 1,1 A, prędkością 71 RPM i maksymalnym momentem obrotowym 6 kg*cm. Pololu 3254
Brak towaru
Silnik o średnicy 25 mm i długości 54 mm, z metalową przekładnią 99:1, napięciem pracy 12 V, poborem prądu od 0,1 A do 1,1 A, prędkością 55 RPM i maksymalnym momentem obrotowym 8 kg*cm. Pololu 3255
Brak towaru
Silnik o średnicy 25 mm i długości 50 mm, z metalową przekładnią 20,4:1, napięciem pracy 6 V, poborem prądu od 0,55 A do 6,5 A, prędkością 460 RPM i maksymalnym momentem obrotowym 5,5 kg*cm. Pololu 1572

















