






















293,33 zł Netto
Zestaw do budowy robota mobilnego z podwoziem Mecanum na bazie Raspberry Pi. Wyposażony w moduł rozszerzeń Raspberry Pi Build HAT. Waveshare BuildMecar-Kit-A
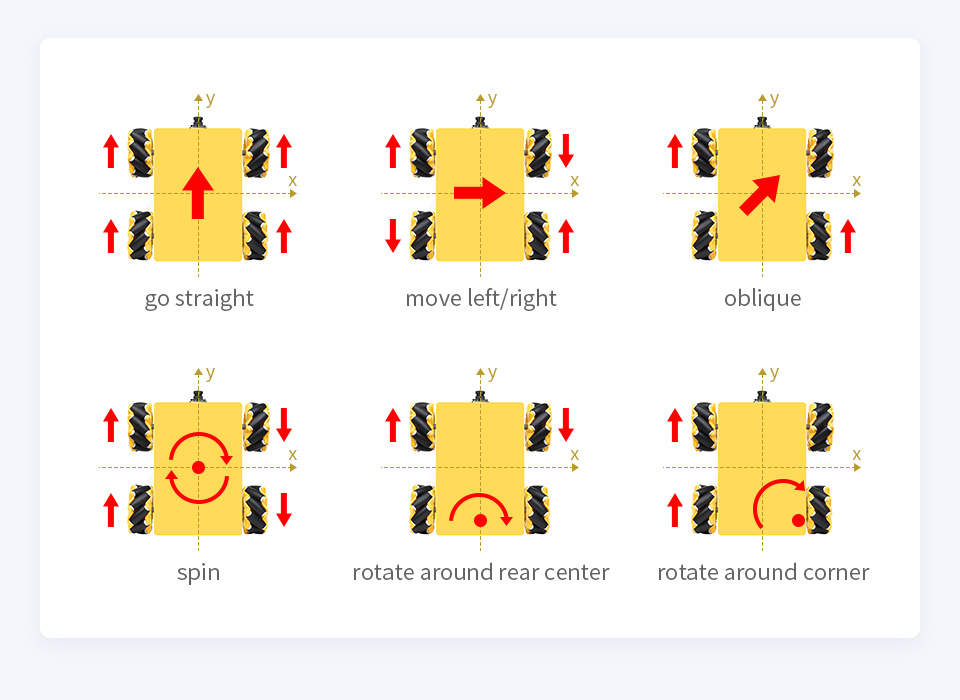
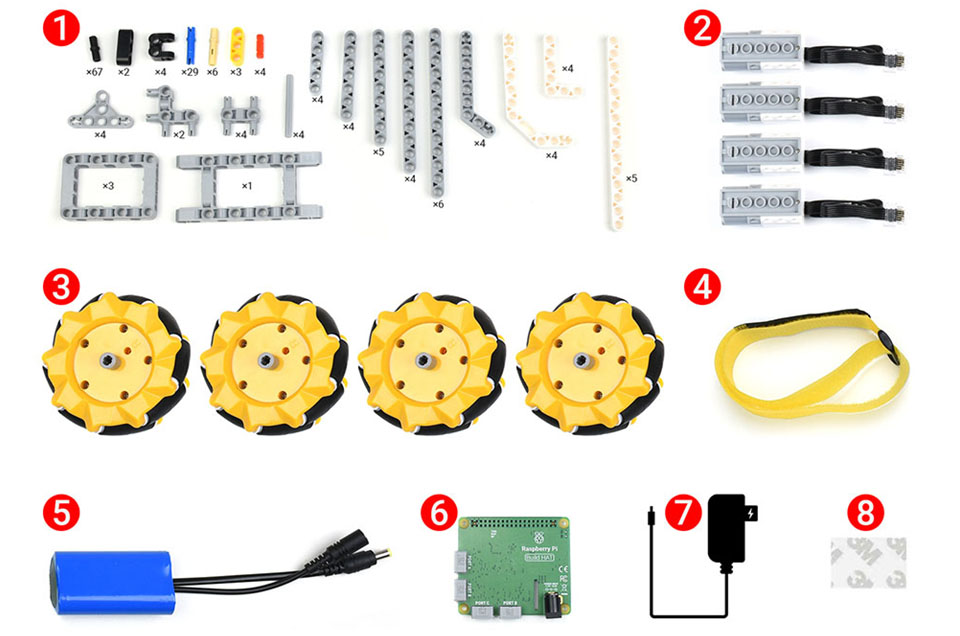
Zestaw do budowy robota mobilnego z podwoziem Mecanum na bazie minikomputera Raspberry Pi. Konstrukcja oparta została o zestaw klocków pozwalających w łatwy sposób modyfikować pojazd i dostosowywać go do własnych potrzeb. Robot napędzany jest za pomocą czterech silników prądu stałego oraz kół Mecanum, które pozwalają na poruszanie się nie tylko do przodu i do tyłu, ale także na boki, co znacznie zwiększa jego mobilność i stanowi ciekawą alternatywę dla standardowych układów napędowych.
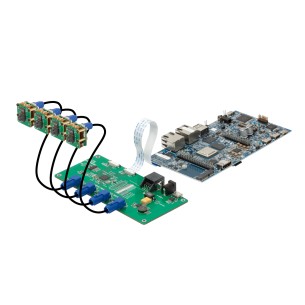
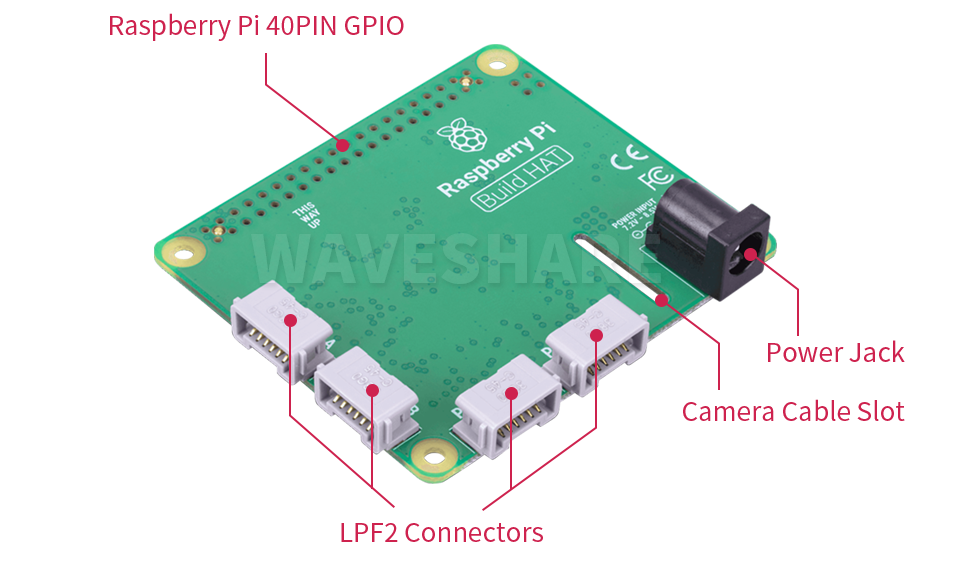
Robot wykorzystuje sterownik Raspberry Pi Build HAT, czyli oficjalną płytkę rozszerzeń zaprojektowana we współpracy z LEGO® Education. Została stworzona, aby ułatwić sterowanie silnikami i czujnikami LEGO za pomocą minikomputerów RPi. HAT wyposażony jest w cztery złącza do silników i czujników LEGO Technic z serii LEGO® Education SPIKE™ Prime.
Zestaw zasilany jest akumulatorem Li-Ion 7,4 V.
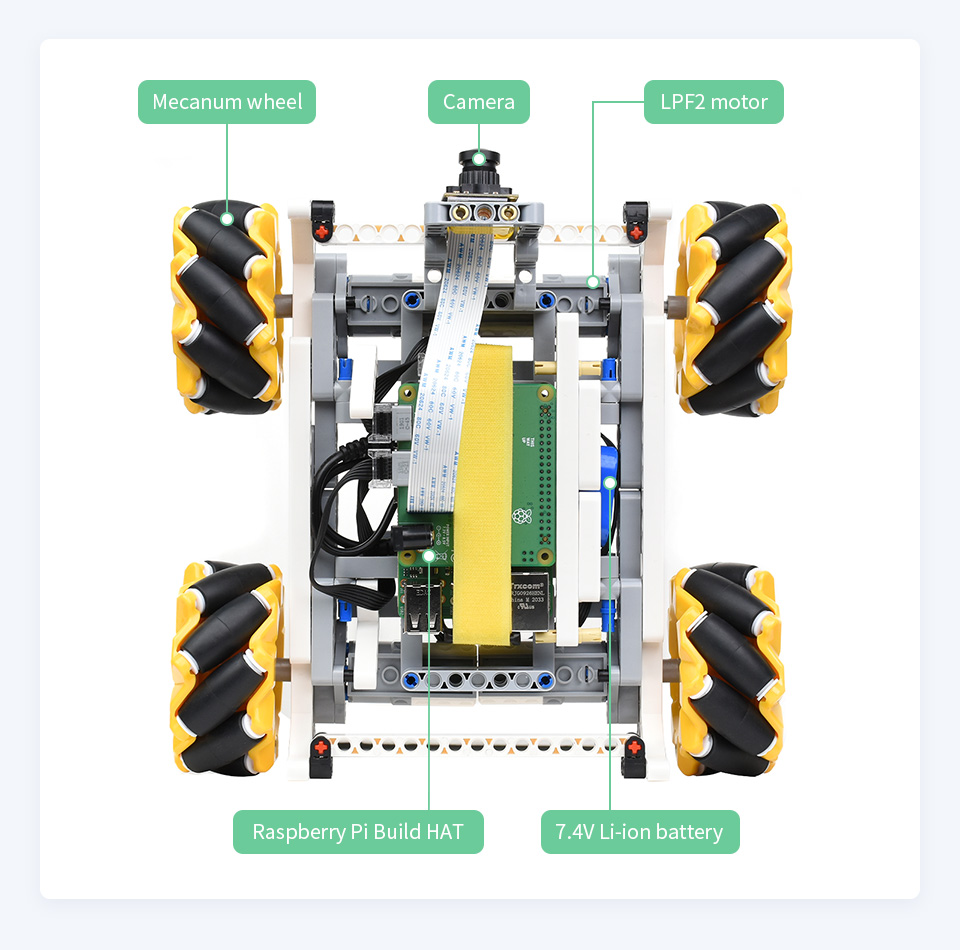
Biblioteka Build HAT Python pozwala sterować różnymi silnikami i czujnikami za pomocą złącza LPF2, co umożliwia tworzenie kreatywnych kombinacji za pomocą nakładki Build HAT i bloków konstrukcyjnych. Pełna dokumentacja oraz przykłady konfiguracji dostępne są na stronie produktu.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Najnowsza wersja komputera z serii Raspberry Pi: Raspberry Pi 4 model B z czterordzeniowym SoC (Broadcom BCM2711, Cortex-A72) pracującym z częstotliwością 1,8GHz, 1GB pamięci RAM LPDDR4, układ graficzny Broadcom VideoCore VI.
Najnowsza wersja komputera z serii Raspberry Pi: Raspberry Pi 4 model B z czterordzeniowym SoC (Broadcom BCM2711, Cortex-A72) pracującym z częstotliwością 1,8GHz, 2GB pamięci RAM LPDDR4, układ graficzny Broadcom VideoCore VI.
Długo oczekiwany komputer Raspberry Pi 4 model B z czterordzeniowym układem SoC Broadcom BCM2711 (4 x Cortex-A72) pracującym z taktowaniem 1,8GHz, pamięcią RAM LPDDR4 o pojemności 4 GB i układem graficznym Broadcom VideoCore VI
Długo oczekiwany komputer Raspberry Pi 4 model B z czterordzeniowym układem SoC Broadcom BCM2711 (4 x Cortex-A72) pracującym z taktowaniem 1,8GHz, pamięcią RAM LPDDR4 o pojemności 8 GB i układem graficznym Broadcom VideoCore VI
Edukacyjny robot do nauki programowania oparty na module micro:bit. Wyposażony w czerwoną obudowę ochronną. DFRobot ROB0148-EN-LR
Edukacyjny robot do nauki programowania oparty na module micro:bit. Wyposażony w białą obudowę ochronną. DFRobot ROB0148-EN-LW
Edukacyjny robot do nauki programowania oparty na module micro:bit. Wyposażony w zieloną obudowę ochronną. DFRobot ROB0148-EN-LG
Edukacyjny robot do nauki programowania oparty na module micro:bit. Wyposażony w niebieską obudowę ochronną. DFRobot ROB0148-EN-LB
Zestaw do budowy robota opartego na Raspberry Pi. Zawiera podwozie, kamerę i zasilacz. Waveshare AlphaBot-Pi Acce Pack
Brak towaru
Zestaw do budowy inteligentnego robota JetBot na bazie Jetson Nano. Składa się z modułu rozszerzeń, kamery z czujnikiem obrazu czujnika LIDAR, silników, podstawy jezdnej i 9-osiowego IMU. Waveshare JetBot ROS AI Kit Acce
Brak towaru
Zestaw akcesoriów do budowy autonomicznego robota wyścigowego w oparciu NVIDIA Jetson Nano. Waveshare JetRacer ROS AI Kit Acce
Brak towaru
Zestaw do budowy autonomicznego robota wyścigowego w oparciu o NVIDIA Jetson Nano Dev Kit. Waveshare JetRacer ROS AI Kit B
Brak towaru
Zestaw do budowy inteligentnego robota JetBot na bazie Jetson Nano. Składa się z zestawu deweloperskiego, modułu rozszerzeń, kamery z czujnikiem obrazu IMX219, czujnika LIDAR, silników, podstawy jezdnej i 9-osiowego IMU. Waveshare JetBot ROS AI Kit B
Brak towaru
Wielofunkcyjny robot z podwoziem 2WD i kontrolerem w postaci płytki Raspberry Pi Pico. Jest uniwersalną platformą mobilną, która może np. śledzić linię lub wyszukiwać i omijać przeszkody. Waveshare PicoGo-Kit-EU
Brak towaru
Wielofunkcyjny robot z podwoziem 2WD i kontrolerem w postaci minikomputera Raspberry Pi 4B z 4 GB RAM. Jest uniwersalną platformą mobilną, która może np. śledzić linię lub wyszukiwać i omijać przeszkody. Waveshare AlphaBot2-Pi4B-4GB-EU
Brak towaru
Zestaw do montażu ramienia robotycznego o czterech stopniach swobody (4DOF). Manipulator oparty został na serwomechanizmach i jest sterowany bezprzewodowo za pomocą Raspberry Pi. Waveshare Robot Arm for Pi (for Europe)
Brak towaru
Wielofunkcyjny robot z podwoziem 2WD i kontrolerem w postaci minikomputera Raspberry Pi 3B. Jest uniwersalną platformą mobilną, która może np. śledzić linię lub wyszukiwać i omijać przeszkody. Waveshare AlphaBot-Pi (for Europe)
Brak towaru
Zestaw do budowy inteligentnego robota JetBot na bazie Jetson Nano. Składa się z zestawu deweloperskiego, modułu rozszerzeń, kamery z czujnikiem obrazu IMX219, czujnika LIDAR, silników, podstawy jezdnej i 9-osiowego IMU. Waveshare JetBot ROS AI Kit A
Brak towaru
Zestaw do budowy autonomicznego robota wyścigowego w oparciu o NVIDIA Jetson Nano. Waveshare JetRacer AI Kit A
Brak towaru
Zestaw do budowy autonomicznego robota wyścigowego w oparciu o NVIDIA Jetson Nano. Waveshare JetRacer Pro AI Kit A
Brak towaru
Zestaw do budowy robota mobilnego z podwoziem Mecanum na bazie Raspberry Pi. Wyposażony w moduł rozszerzeń Raspberry Pi Build HAT. Waveshare BuildMecar-Kit-A



















