81,68 zł Netto
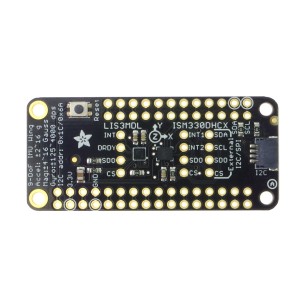
Moduł IMU, który dodaje płytkom Feather pełny 9-osiowy zestaw czujników do pomiaru ruchu i orientacji. Łączy akcelerometr, żyroskop i magnetometr, oferując stabilne i dokładne dane idealne do robotyki, stabilizacji, urządzeń ubieralnych i analiz ruchu 3D. Moduł komunikuje się przez I2C i posiada port STEMMA QT, co ułatwia integrację oraz podłączanie dodatkowych czujników bez lutowania. Adafruit 4565
LSM6DSOX + LIS3MDL FeatherWing to zaawansowany moduł rozszerzeń, który umożliwia wyposażenie dowolnej płytki Feather w precyzyjny 9-osiowy system pomiaru ruchu. Urządzenie łączy w sobie nowoczesny akcelerometr z żyroskopem oraz czuły magnetometr, co pozwala uzyskać pełen zestaw danych orientacyjnych. Dzięki temu świetnie sprawdza się w projektach wymagających dokładnego śledzenia pozycji, ruchu i kierunku, takich jak robotyka, systemy stabilizacji czy urządzenia ubieralne.
Zastosowany sensor LSM6DSOX cechuje się wyjątkowo niskim poziomem szumów i dryftu, co przekłada się na stabilne wyniki pomiarowe. Magnetometr LIS3MDL umożliwia określanie orientacji względem północy magnetycznej, co znacznie poszerza możliwości analizy ruchu. Moduł korzysta z interfejsu I2C, dzięki czemu może być używany z praktycznie każdą płytką Feather, a dodatkowy port STEMMA QT pozwala na łatwe podłączanie kolejnych czujników bez lutowania. Producent przewidział również wyprowadzenia pinów przerwań oraz zworki adresowe, ułatwiające integrację z bardziej rozbudowanymi systemami.
Dzięki gotowym bibliotekom dla Arduino i CircuitPython konfiguracja modułu zajmuje tylko chwilę. Urządzenie zostało zaprojektowane z myślą o niezawodności, a cztery otwory montażowe zapewniają stabilne mocowanie. Moduł idealnie nadaje się do szybkiego prototypowania oraz projektów wymagających dokładnych danych 3D.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Płytka z mikrokontrolerem RP2040 wyposażonym w dwa rdzenie ARM Cortex-M0+, które pracują z częstotliwością 133 MHz, 264 kB RAM. Na płytce znajduje się również 8 MB pamięci QSPI flash. Układ może być programowany w C/C++ lub MicroPython. Adafruit 4884
Moduł z układem WiFi i BLE Espressif ESP32-S3. Integruje obwód ładowania LiPo oraz diodę RGB. Wyposażony został w złącze STEMMA QT. Adafruit 5323
Nowoczesna płytka rozwojowa w formacie Feather, wyposażona w dwurdzeniowy mikrokontroler Raspberry Pi RP2350 Cortex M33 o taktowaniu 150 MHz i 8 MB pamięci PSRAM, idealna do zaawansowanych projektów IoT i aplikacji Micropython/CircuitPython. Płytka oferuje szeroki zestaw portów, w tym złącze HSTX 22-pin, USB-C z bootloaderem oraz STEMMA QT, a także liczne GPIO i zintegrowany układ ładowania baterii LiPo, łącząc wysoką wydajność z wygodą użytkowania. Adafruit 6130
Moduł 10 DoF z akcelerometrem ADXL345, magnetometrem HMC5883L, żyroskopem ITG-3205 i barometrem BMP280. Komunikacja przez interfejs I2C. DFRobot SEN0140
Brak towaru
Moduł z 6-osiowym czujnikiem IMU LSM6DSO, który łączy 3-osiowy akcelerometr i żyroskop oraz bufor FIFO o pojemności 9 kB i funkcje obsługi zdarzeń. Komunikuje się przez I2C lub SPI. SparkFun SEN-18020
Moduł z 9-osiowym czujnikiem IMU ICM-20948, zintegrowanym 3-osiowym akcelerometrem, żyroskopem i magnetometrem oraz cyfrowym procesorem ruchu DMP (Digital Motion Processor). Komunikacja przez I2C. Pimoroni PIM448
Brak towaru
Moduł z 9-osiowym czujnikiem IMU BNO055. Ma wbudowany układ przetwarzający, który zwraca dane jako orientację w przestrzeni 3D. Komunikuje się przez I2C. Adafruit 4646
Brak towaru
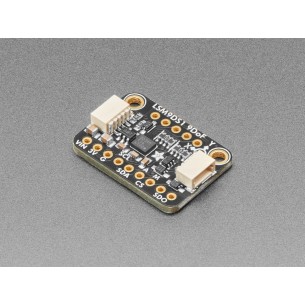
Moduł z 3-osiowym akcelerometrem i żyroskopem ISM330DHCX. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C lub SPI. Adafruit 4502
Moduł z 9-osiowym czujnikiem IMU ICM-20948. Układ to zintegrowany 3-osiowy akcelerometr, żyroskop i magnetometr oraz cyfrowy procesor ruchu DMP (Digital Motion Processor). Komunikacja przez I2C lub SPI. Adafruit 4554
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSOX. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4438
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU-6050. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C. Adafruit 3886
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSOX oraz magnetometrze LIS3MDL. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4517
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSO32. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4692
Moduł z 6-osiowym czujnikiem IMU, który pozwala na pomiar przyspieszenia i prędkości obrotowej w szerokim zakresie ±30g i ±4000dps. Komunikuje się przez I2C. Adafruit 4464
Brak towaru
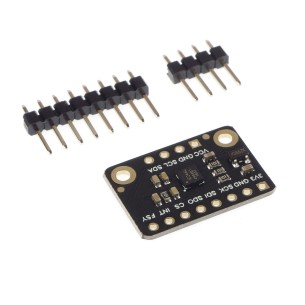
Kompaktowy czujnik 9-DOF, łączący 3-osiowy akcelerometr, magnetometr i żyroskop, umożliwiający precyzyjne określenie orientacji obiektu. Dzięki wsparciu dla magistrali I2C/SPI, kompatybilności z systemem STEMMA QT oraz zasilaniu 3V/5V, znajduje zastosowanie w projektach robotyki, nawigacji 3D, VR, AR oraz systemach stabilizacji. Adafruit 4634
Brak towaru
Moduł z 9-osiowym IMU dedykowany do płytek Feather. Łączy układ ISM330DHCX (akcelerometr i żyroskop) i LIS3MDL (magnetometr). Komunikacja przez interfejs I2C. Adafruit 4569
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU6050. Komunikuje się przez interfejs I2C lub UART
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie ICG-20660L. Komunikuje się przez interfejs I2C lub SPI. DFRobot SEN0443
Moduł z 9-osiowym czujnikiem IMU ICM-20948 (3-osiowym akcelerometrem, żyroskopem i magnetometrem oraz DMP) i czujnikiem ciśnienia BMP280. Komunikacja przez I2C. Waveshare 10 DOF IMU Sensor (D)
Brak towaru
Moduł IMU, który dodaje płytkom Feather pełny 9-osiowy zestaw czujników do pomiaru ruchu i orientacji. Łączy akcelerometr, żyroskop i magnetometr, oferując stabilne i dokładne dane idealne do robotyki, stabilizacji, urządzeń ubieralnych i analiz ruchu 3D. Moduł komunikuje się przez I2C i posiada port STEMMA QT, co ułatwia integrację oraz podłączanie dodatkowych czujników bez lutowania. Adafruit 4565