- Out-of-Stock





No product available!
No product available!
No product available!
No product available!
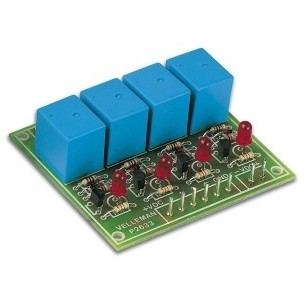
Dimmer lamp in the standard dmx - set for self-assembly
No product available!
No product available!
No product available!
No product available!
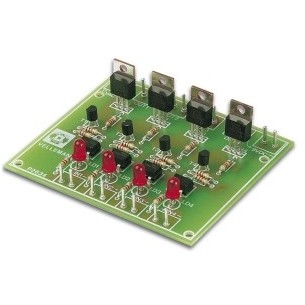
Constant voltage transducer for pulse width - a self-assembly set
No product available!
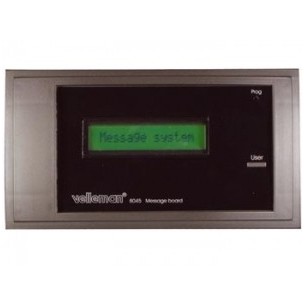
Measuring recorder 8 inputs, lcd display, serial connection - set for self-assembly
No product available!
Multifunctional up / down meter - a set for self-assembly.
No product available!
Guitar preamplifier with headphone output - self-assembly set
No product available!
No product available!
No product available!
No product available!
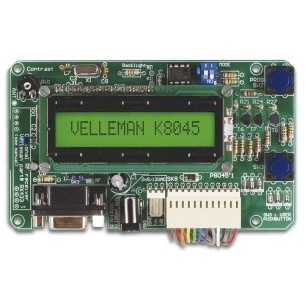
Independently programmable control module - set for self-assembly
No product available!