






















zł265.11 tax excl.
This control board turns the Romi chassis into a programmable robot based on the Arduino-compatible ATmega32U4 MCU. Pololu 3544
The Romi 32U4 Control Board turns the Romi chassis into a programmable robot based on the Arduino-compatible ATmega32U4 MCU. Its features include integrated dual motor drivers, a versatile power circuit, and inertial sensors, as well as connections for quadrature encoders and an optional LCD. The board also has the ability to interface with an added Raspberry Pi, making the foundation for a complete Raspberry Pi-controlled Romi robot.
Like the A-Star 32U4 programmable controllers, the Romi 32U4 Control Board is built around a USB-enabled Atmel ATmega32U4 AVR microcontroller, and it ships preloaded with an Arduino-compatible bootloader. The control board features two H-bridge motor drivers and is designed to connect to a Romi Encoder Pair Kit (available separately) to allow closed-loop motor control. It also includes a powerful 5 V switching step-down regulator that can supply up to 2 A continuously, along with a versatile power switching and distribution circuit. A 3-axis accelerometer and gyro enable a Romi 32U4 robot to make inertial measurements, estimate its orientation, and detect external forces. Three on-board pushbuttons offer a convenient interface for user input, while indicator LEDs, a buzzer, and a connector for an optional LCD allow the robot to provide feedback.
The Romi 32U4 Control Board can be used either as a standalone control solution or as a base for a more powerful Raspberry Pi controller. Its on-board connector and mounting holes allow a compatible Raspberry Pi (Model B+ or newer, including Pi 3 Model B and Model A+) to plug directly into the control board. Integrated level shifters make it easy to set up I²C communication and interface other signals between the two controllers, and the control board automatically supplies 5 V power to an attached Raspberry Pi. In this setup, the Raspberry Pi can handle the high-level robot control while relying on the Romi 32U4 Control Board for low-level tasks, like running motors, reading encoders, and interfacing with other analog or timing-sensitive devices.
The I/O lines of both the ATmega32U4 and the Raspberry Pi are broken out to 0.1″-spaced through-holes along the front and rear of the control board, and the board’s power rails are similarly accessible, enabling sensors and other peripherals to easily be connected.
A software add-on is available that makes it easy to program a Romi 32U4 robot from the Arduino environment, and we have Arduino libraries and example sketches to help get you started. A USB A to Micro-B cable (not included) is required for programming.
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Kit includes all the basic mechanical parts to get up and running, including two motors, two wheels, one ball caster, and battery contacts. Pololu 3500
No product available!
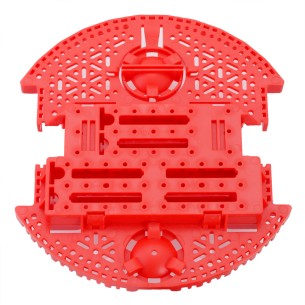
The versatile Romi chassis is a great starting point for your next mobile robot. This kit includes all the basic mechanical parts to get up and running, including two motors, two wheels, one ball caster, and battery contacts. The wheels and ball are white; all other plastic components are red.
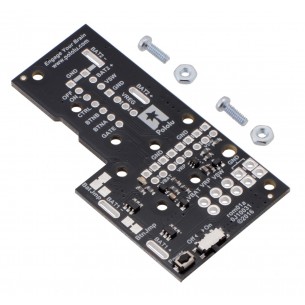
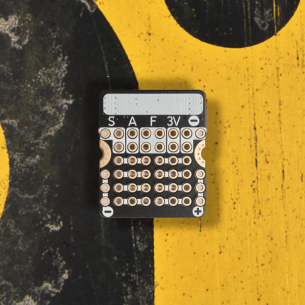
This power distribution board is designed specifically for the Romi chassis as a convenient way to access the chassis’s battery power and pass that on the rest of the electronics that make up your robot. Pololu 3541
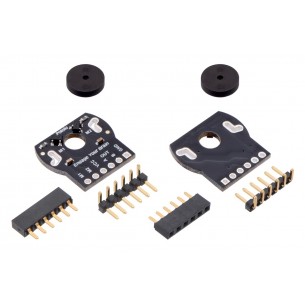
A set of magnetic encoders for the Romi Chassis chassis. With their help, we can measure the distance traveled by our mobile robot or control the engine speed. Pololu 3542
No product available!
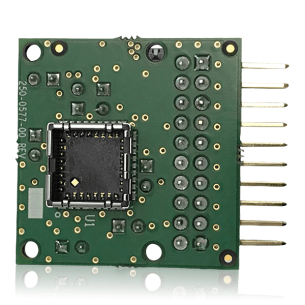
The power module together with the engine controller has been specially created for the Romi Chassis chassis. With its help, we will supply all components of our construction and we will be able to control the engines responsible for the movement of the chassis. Pololu 3543
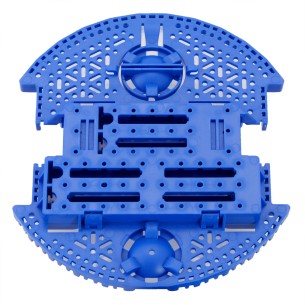
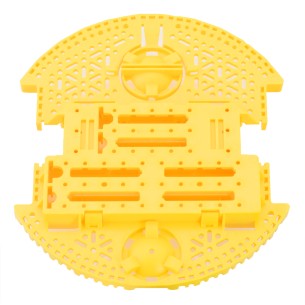
The basis of the Romi chassis dedicated to the construction of small, two-wheeled mobile robots with two-wheel drive. Pololu 3511
This item is a set of three plastic rollers, a 1″-diameter plastic ball, and a retaining clip that can be used on the front or back ball caster locations on the Romi chassis base plate. The ball is white, and all other parts are red. It is included as part of the red Romi Chassis Kit.
This power distribution board is designed specifically for the Romi chassis as a convenient way to access the chassis’s battery power and pass that on the rest of the electronics that make up your robot. Pololu 3541
The basis of the Romi chassis dedicated to the construction of small, two-wheeled mobile robots with two-wheel drive. Pololu 3516
No product available!
Support ball with fixing, designed for Romi Chassis chassis. Pololu 3534
The power module together with the engine controller has been specially created for the Romi Chassis chassis. With its help, we will supply all components of our construction and we will be able to control the engines responsible for the movement of the chassis. Pololu 3543
Expansion board that allows you to add more levels to the Romi Chassis robot. Pololu 3560
Support ball with fixing, designed for Romi Chassis chassis. Pololu 3536
This item is a pair of motor-holding clips for the Romi chassis in red. These clips snap into the main Romi base plate, and then the motors snap into the clips. It is included as part of the red Romi Chassis Kit.
The basis of the Romi chassis dedicated to the construction of small, two-wheeled mobile robots with two-wheel drive. Pololu 3512
The mountings allow the engine to be mounted on the Romi Chassis chassis. The motor is snap-fitted, which facilitates its quick assembly. The mountings are in yellow. Polol 3524
The basis of the Romi chassis dedicated to the construction of small, two-wheeled mobile robots with two-wheel drive. Pololu 3514
A set of magnetic encoders for the Romi Chassis chassis. With their help, we can measure the distance traveled by our mobile robot or control the engine speed. Pololu 3542
No product available!
The basis of the Romi chassis dedicated to the construction of small, two-wheeled mobile robots with two-wheel drive. Pololu 3510
The mountings allow the engine to be mounted on the Romi Chassis chassis. The motor is snap-fitted, which facilitates its quick assembly. The fixings are in pink. Pololu 3521
This control board turns the Romi chassis into a programmable robot based on the Arduino-compatible ATmega32U4 MCU. Pololu 3544