









- Out-of-Stock


| Author: Daniel W. Lewis ISBN: 83-7243-412-3 Format: B5, 300 pages Includes CD-ROM Publisher: RM Original edition: Fundamentals of Embedded Software: Where C and Assembly Meet Prentice Hall |
| About the book |
| This book is a great alternative to traditional university texts on computer organization and programming in assembler language. Assembler appears in it as it is most often used in practice - as a tool to implement small, fast and specialized procedures called from a main program written in a high level language, such as C. Based on embedded software, the book introduces multithreaded programming techniques, systems with expropriation and expropriation, shared resources and scheduling, thus providing a solid foundation for further learning of operating systems, real-time systems and microprocessor-based design. The book should help:
Table of Contents Preface Chapter 1 Introduction 1.1 What is a built-in system? Chapter 2 Data representation 2.1 Binary numbers with constant precision Chapter 3 Maximum use of C 3.1. Total types Chapter 4 The programmer's view on building a computer 4.1 Memory Chapter 5 Combining C language and assembly language 5.1 Programming in assembler Chapter 6 Programming the input / output 6.1 I / O instructions for Intel processors Chapter 7 Concurrent software 7.1 Multi-level systems Chapter 8 Sorting tasks 8.1 Thread states Chapter 9 Memory management 9.1 Objects in C language Chapter 10 Shared memory 10.1 Identifying shared objects Chapter 11 System initialization 11.1. Organization of memory Appendix A Contents of the CD-ROM Appendix B Compiler C / C ++ DJGPP Installation Appendix C NASM Assembler Installation Appendix D Program designs CD files required by all applications Appendix E libepc library Memory organization and initialization Appendix F Pre-loading program Index |
Universal 45W USB wall charger with 5-20V/3A output. It is equipped with USB type A and USB type C sockets, QC3.0 fast charging and Power Delivery. Akyga AK-CH-14
No product available!
Universal USB wall charger with 65W power and 5-20V/3A output. It is equipped with USB type A and USB type C sockets, QC3.0 fast charging and Power Delivery. Akyga AK-CH-15
No product available!
Laser distance sensor with a measuring range from 0.1 m to 15 m. Communicates via the UART or I2C interface. Waveshare TOF Laser Range Sensor (B)
No product available!
Digital LED voltmeter 0,28 "with measuring range 0-100 V. Module powered with 3-30V voltage.
No product available!
Multifunctional robot with 2WD chassis and controller in the form of a Raspberry Pi minicomputer. It is a universal mobile platform that can, for example, avoid obstacles or detect objects using a camera. Pimoroni PIM598
No product available!
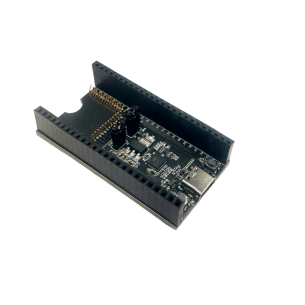
Module with RP2040 microcontroller dedicated to matrix displays with HUB75 interface. Pimoroni PIM584
No product available!
Heat shrink tubing with tin and glue. Used for quick connection of wires
No product available!
Heat shrink tubing with tin and glue. Used for quick connection of wires
No product available!
Heat shrink tubing with tin and glue. Used for quick connection of wires
No product available!
Module with a digital gas sensor MiCS-4514. It allows you to measure the concentration of CO, C2H5OH, H2, NO2, NH3 and communicates via the I2C interface. DFRobot SEN0377
No product available!
Universal power supply module working on the basis of four 18650 batteries. It offers DC outputs with voltages of 9 V, 12 V, 24 V and adjustable in the range from 1 to 20 V, as well as two USB 5 V outputs. DFRobot FIT0674
No product available!
Flexible adapter for microSD to SD card with a length of 25 cm. Supports all capacities and card types, including: 16 GB, 32 GB, 64 GB, 128 GB Micro SD/SDHC
No product available!
Black and white e-Paper display with a diagonal of 7.5" and a resolution of 800x480 px. SPI interface. Without PCB. Waveshare 7.5inch e-Paper (G)
No product available!
A mini welding machine designed to connect 18650 type battery cells
No product available!
Brushless motor driver module with current efficiency up to 20 A. It can work with LiPo 3S and 4S packages. BLHeli XSD20A
No product available!
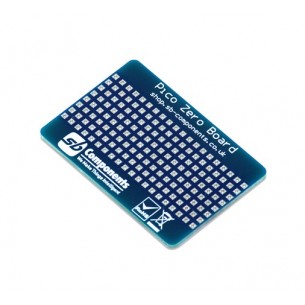
The board with prototype holes is dedicated to the Raspberry Pi Pico. It offers an area of 6x20 holes with a 2.54 mm pitch with marked pins. SB Components 21499
No product available!