

- Out-of-Stock


T. Kołacin
About the book
The script is intended for students of the Department of Automobiles and Construction Machines. Its purpose is to familiarize with the basic concepts of automation and theory of machines necessary for further learning their design.
Table of Contents
Preface
1. BASICS OF THE STRUCTURE OF MECHANISMS
1.1. Basic concepts
1.2. Classification of kinematic pairs
1.3. Structural formulas
1.4. Passive ties
1.5. Unnecessary degrees of freedom
1.6. Basics of structural division of mechanisms
2. ANALYSIS AND KINEMATIC SYNTHESIS OF MECHANISMS
2.1. Kinematics methods
2.2. Analytical methods of kinematics
2.3. Articulated quadrangle and its transformations
2.4. Synthesis of lever mechanisms
3. CINEMATICS OF CURVE MECHANISMS
3.1. Analysis of cam mechanisms
3.2. Synthesis of cam mechanisms
4. DYNAMICS OF MECHANISMS
4.1. Determination of concentrated replacement masses
4.2. The condition of the static determination of the mechanism
4.3. Force plan of the driving member
4.4. Analytical and precise determination of forces in flat mechanisms without friction
4.5. Determination of forces in your mechanisms including friction
5. BASIC CONCEPTS OF AUTOMATION
5.1. Basic terms
5.2. Classification of automation systems
5.3. Properties of linear systems
5.4. Linearization of functions
5.5. Types of extortion
5.6. Principles of the operator's account
5.7. Transitional state of the system
5.8. Operator transmittance and its properties
6. CHARACTERISTICS OF COMPONENTS AND SYSTEMS
6.1. Temporary (step) characteristics
6.2. Frequency characteristics
6.3. Logarithmic characteristics
7. PROPERTIES OF LINEAR ELEMENTS
7.1. Free-flowing elements (proportional)
7.2. First order inertial elements
7.3. Secondary inertial elements
7.4. Integrating elements
7.5. Differentiating elements
7.6. Delay elements
8. CONSTRUCTION AND TRANSFORMATION OF STRUCTURAL SCHEMES
8.1. Construction diagrams
8.2. Construction of structural (block) diagrams
8.3. Converting structural (block) diagrams
9. MACHINE DYNAMICS
9.1. Mass reduction
9.2. Reduction of stiffness and damping
9.3. Reduction of forces
9.4. Equations of machine motion
9.5. Integration of the machine motion equation. Calculation of the brake
9.6. Unevenness of the machine's gear. Calculating the flywheel
9.7. Basics of balancing flat mechanisms
10. REGULATORS
10.1. The structure of regulators and the equation of motion of the system with the regulator
10.2. Short classification of regulators
10.3. Types of regulators, their characteristics and operation
10.4. Amplifier regulator circuit
10.5. Adjusting the regulators
11. CRITERIA FOR ASSESSMENT OF SYSTEMS
11.1. The general condition for the stability of linear systems
11.2. Distribution of elements in the plane of complex numbers
11.3. Hurwitz criterion
11.4. The Nyquist criterion
11.5. Impact of gains and delays on closed system stability
11.6. Phase stock and stock of the closed system module
11.7. Calculation of closed system characteristics. Closed system resonance
11.8. Layout correction
11.9. Criteria for the assessment of systems in steady states
11.10. Criteria for assessing dynamic states
11.11. Laying equations of automation systems. Analysis of systems
12. NONLINE SYSTEMS
12.1. Basic nonlinearities
12.2. Determination of static characteristics
12.3. Study of the dynamics of nonlinear systems
13. DESCRIPTION OF SYSTEMS IN THE CONDITION OF THE STATE
13.1. Admission
13.2. Matrix record of the normal form
13.3. Description of systems using state coordinates
13.4. Obtaining state coordinates and block diagrams with transmittance
13.5. Determining the operator transfer function from the state coordinate matrix
13.6. Solving linear system state equations
13.7. Converting layouts. controllability
13.8. Observability of the dynamic system
13.9. Determining the desired feedback law
Bibliography
No product available!
Integrated circuit - HDMI Transmitter Port Protection and Interface Device, TSSOP36, ON Semiconductor, RoHS
No product available!
No product available!
No product available!
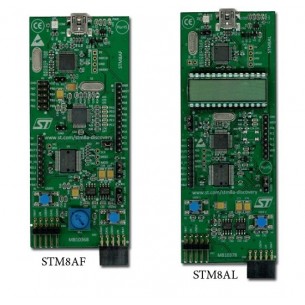
Discovery kit for STM8A Automotive series - with STM8AF5288 and STM8AL3L68 MCUs, STM, RoHS
No product available!
Regulator for DC brush motors, 10A, built-in BEC 1A, RoHS
No product available!
No product available!
No product available!
No product available!
No product available!
No product available!
No product available!
Two large (120mm-diameter) wheels with black tires are made of soft, spiked rubber for increased traction, and the plastic hubs are metallic red in color. Sold in pairs. Pololu 1555
No product available!
No product available!
No product available!
No product available!
T. Kołacin