









- Out-of-Stock


About the book
Table of Contents
1. Introduction
2. Introductory information on mathematics and theory of mechanisms
2.1. Matrices, vectors, differential calculus. Selected numerical methods3. Description of the kinematics of the mechanism
3.1. Composite motion of a rigid member4. Kinematic analysis of mechanisms in joint coordinates
4.1. Admission5. Kinematic analysis of mechanisms in absolute coordinates
5.1. Admission. Formulation of kinematics tasks6. Excessive ties. Quaint locations. Analysis starting points
6.1. AdmissionPrinted circuit board and programmed circuit for the MIN-MAX 2-channel thermometer with alarm. AVT1999 A +
No product available!
AVT kit for mounting a 2-channel MIN-MAX thermometer with an alarm. AVT1999 B
No product available!
Assembled 2-channel MIN-MAX thermometer with alarm. AVT1999 C
No product available!
Printed circuit board and programmed layout for a miniature reminder. AVT5638 A +
No product available!
AVT kit for self-assembly of a miniature reminder. AVT5638 B
No product available!
No product available!
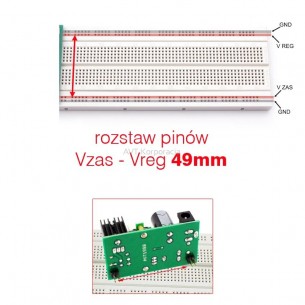
A circuit board for an adjustable power supply for contact plates. AVT1990 A
No product available!
AVT kit for self-assembly of an adjustable power supply for contact plates. AVT1990 B
No product available!
Assembled adjustable power supply for contact plates. AVT1990 C
No product available!
PCB for modular receiver for 80m and 40m bandwidth. Dosia - S-meter signal level meter. AVT3197 A
No product available!
Pololu motor with 48 CPR encoder, with 227: 1 transmission, standard 12V voltage and 33RPM speed. Polol 3245
No product available!
Development kit based on the Arm Cortex-M4 32-bit microcontroller with a frequency of 180 MHz. The module has a built-in 2MB Flash memory, 256 KB SRAM, SDRAM controller, HS USB and Ethernet MAC. TWR-K65F180M
No product available!
FRDM-K28F is a development board for Kinetis microcontrollers based on ARM Cortex-M4 with numerous peripherals including 6-axis digital accelerometer and magnetometer, USB interface, microSD card slot, three-color LED and two user buttons. FRDM-K28F
No product available!
S32K144EVB-Q100X is an advanced development board from NXP Semiconductors, based on the ARM Cortex-M4 microcontroller, ideal for prototyping embedded applications in automotive and industrial. It supports communication interfaces such as CAN, LIN, SPI, I2C and UART, and thanks to a variety of connectors and compatibility with NXP development tools, it allows easy integration and creation of real-time applications.
No product available!
X-MCIMX8M-EVK is an evaluation set with an i.MX 8MQuad processor (4 ARM Cortex-A53 cores (operating at 1.5 GHz) and an ARM Cortex-M4 core (operating at 266 MHz). This chip has 1 MB of L2 cache memory. There are 4 GB of LPDDR4 memory, 16 GB of eMMC 5.0 memory, 256 Mb of QSPI memory and a slot for microSD memory cards.
No product available!
MCIMX6DL-SDP is an NXP evaluation set with i.MX 6Quad Arm Cortex-A9 1 GHz processor, 1 GB of SDRAM memory and USB OTG connector, HDMI, Ethernet connector and SD card slot. It has a built-in LVDS display. MCIMX6DL-SDP
No product available!