zł18.89 tax excl.
AB two-phase pulse wave, measured by two infrared reflective sensor. These two sensor pulse waveform is close to a phase difference of 90 degrees, through the AB two-phase lead and lag of the waveform judged wheel forward rotation or the reverse. SEN0116

free shipping in Poland for all orders over 500 PLN

If your payment will be credited to our account by 11:00

Each consumer can return the purchased goods within 14 days
This encoder is matched with 2wd miniQ Robot chassis. AB two-phase pulse wave, measured by two infrared reflective sensor. These two sensor pulse waveform is close to a phase difference of 90 degrees, through the AB two-phase lead and lag of the waveform judged wheel forward rotation or the reverse. You can install it on the motor bracket or mini robot chassis to do the PID and position control.
Note: Please short current R4 when working in 3.3V


2WD miniQ robotic platform is especially designed for students and hobbyists. It\'s versatile and small, suitable for most indoors applications. It features high quality and powerful metal gear motors which make it a speedy robot. It is ideal for maze competition and educational courses, and is very easy to assemble. ROB0049
A set of two optical quadrature encoders for Polol micromotors with a two-sided extended shaft, compatible with the LP, MP, and HP series, 5V power supply. Polol 2590
No product available!
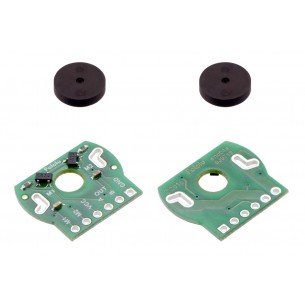
Add quadrature encoders to your 20D mm metal gearmotors (extended back shaft version required) with this kit that uses a magnetic disc and Hall effect sensors to provide 20 counts per revolution of the motor shaft. The sensors operate from 2.7 V to 18 V and provide digital outputs that can be connected directly to a microcontroller or other digital circuit.
A set of magnetic encoders for the Romi Chassis chassis. With their help, we can measure the distance traveled by our mobile robot or control the engine speed. Pololu 3542
No product available!
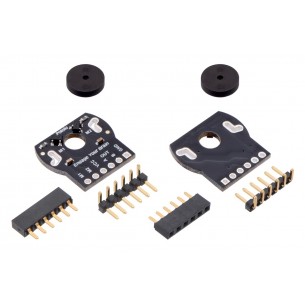
The kit uses a magnetic disc and hall effect sensors to provide 12 counts per revolution of the motor shaft. The sensors operate from 2.7 V to 18 V and provide digital outputs that can be connected directly to a microcontroller or other digital circuit. Compatible with all of the dual-shaft micro metal gearmotors we carry, including the HPCB versions. Pololu 3081
This is the Wheel Encoder Kit from DAGU, a simple add-on to any wheeled robot that can help measure the speed or distance the chassis travels. ROB-12629
No product available!
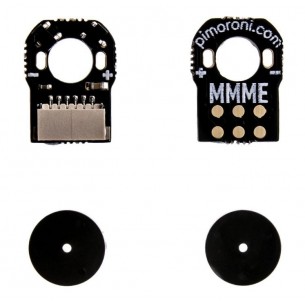
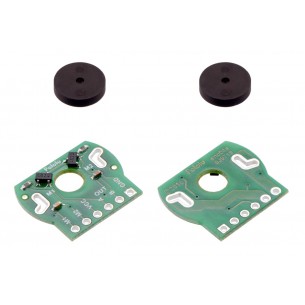
Set of two magnetic encoders for use with micro motors. Regular mounting, set of 2. Pimoroni PIM604
This encoders are designed for DFRobot 3PA and AWD Rovers. It can give you the rotation degree of the wheels. Encoder uses non-contact method to convert the angular displacement signals. Best fit with Micro DC Geared Motor. SEN0038
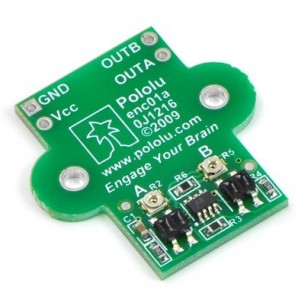
The sensors operate from 2.7 V to 18 V and provide digital outputs that can be connected directly to a microcontroller or other digital circuit. This module is compatible with all of the Pololu dual-shaft mini plastic gearmotors. Pololu 1523
No product available!
Pololu - 1524
Set of two magnetic encoders for use with micro motors. Side mounting, set of 2. Pimoroni PIM605
Pololu - 3498
A set of two magnetic encoders for use with Pololu DC Micro motors. The maximum resolution is 12 pulses per one revolution of the motor shaft. Powered from 2.7V to 18V. Pololu 4761
Magnetic disk for use with magnetic encoders designed for Pololu 20D series motors. It allows you to generate 12 pulses per revolution. Pololu 3449
A set of two magnetic encoders for use with Pololu DC Micro motors. The maximum resolution is 12 pulses per one revolution of the motor shaft. Powered from 2.7V to 18V. Pololu 4760
AB two-phase pulse wave, measured by two infrared reflective sensor. These two sensor pulse waveform is close to a phase difference of 90 degrees, through the AB two-phase lead and lag of the waveform judged wheel forward rotation or the reverse. SEN0116