

- Out-of-Stock


Chapter 1: INTRODUCTION
Chapter 2: THE STATE OF THE PROJECT - A REVIEW OF LITERATURE AND PATENTS
2.1. Synchronous motors with a rotating rotor
2.2. Asynchronous motors with a rolling impeller
2.3. DC motors with a rolling rotor
2.4. Jumping motors with a rolling impeller
2.5. Engines with a rolling impeller for a special application
2.6. Switching reluctance motors with a rotating rotor
Chapter 3: SELECTED ISSUES OF KINEMATICS
Chapter 4: CONSTRUCTION AND PRINCIPLE OF ENGINE OPERATIONS WITH A ROTOR
Chapter 5: ENGINEERED MODEL CONSTRUCTIONS WITH A ROTATING IMPELLER
Chapter 6: ANALYSIS OF BASIC CONSTRUCTION KNITS OF RRSRM ENGINE
Chapter 7: POWER SUPPLY AND CONTROL SYSTEMS
Chapter 8: RELUCCTIVE RELUCTANT MOTOR WITH DOUBLE WEDDING
Chapter 9: RELUCTANT MOTOR SWITCHED WITH A NUCLEYLESSOR ROTOR
9.1. Construction and principle of operation
9.2. Methods for determining the variability of the air gap
9.3. Moment in a reluctance switching motor with a rolling non-cylindrical rotor
9.4. Testing calculations for selected construction solutions
Chapter 10: MACHINES WITH SYMMETRIC PLANET ROLLERS
10.1. Switching motors with rotating planetary rotors
10.2. Generators with rotating planetary rotors
Chapter 11: ENGINE WITH A TIGHTENED ROTOR
Chapter 12: HYBRID RELUCTANT MOTOR SWITCHED WITH A CYLINDER ROTOR
Chapter 13: SWITCH ENGINE WITH A TIGHTENED SPINDLE
13.1. Model constructions of a switching motor with a rolling spherical rotor
13.2. Analysis of the impact of selected construction parameters on the output parameters
Chapter 14: MIXED STRUCTURES
Chapter 15: CALCULATION SYSTEMS TRANSFERRING THE DRIVING MOMENT FROM A ROTATING ROTOR
15.1. Transmission of torque from motors with a rolling cylindrical rotor
15.2. Transmission of torque from motors with a rolling non-cylindrical rotor
15.3. The influence of the eccentricity size on forces and electromagnetic moments
15.4. Ball suspension systems and drive reception
15.5. Transmission in mixed constructions
Chapter 16: MATHEMATICAL MODELS OF THE ENGINE WITH THE ROTOR
16.1. Complex reluctance and impedance model
16.2. Examples of a comprehensive model
16.3. Simulation model
Chapter 17: SUMMARY - DIRECTIONS OF FURTHER RESEARCH
Literature
summary
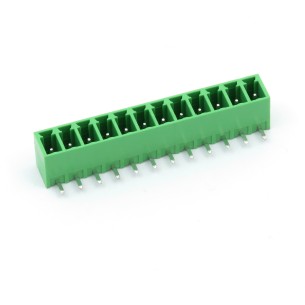
Male terminal block, angled, 12-pin. Pitch 3.81mm. Height 7mm. 15EDGRC
No product available!
Male terminal block, angled, 13-pin. Pitch 3.81mm. Height 7mm. 15EDGRC
No product available!
Male terminal block, angled, 14-pin. Pitch 3.81mm. Height 7mm. 15EDGRC
No product available!
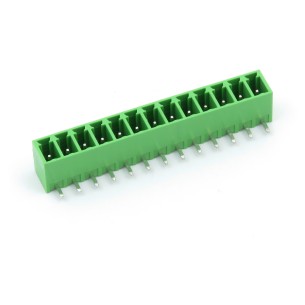
Male terminal block, angled, 16-pin. Pitch 3.81mm. Height 7mm. 15EDGRC
No product available!
Male terminal block, angled, 18-pin. Pitch 3.81mm. Height 7mm. 15EDGRC
No product available!
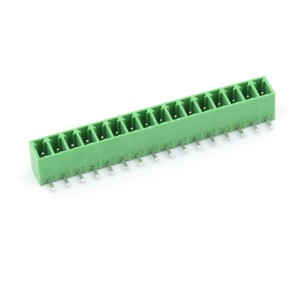
Male terminal block, angled, 20-pin. Pitch 3.81mm. Height 7mm. 15EDGRC
No product available!
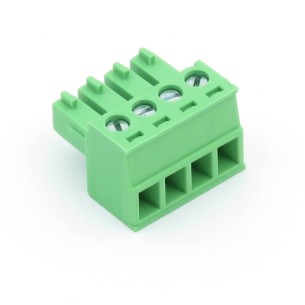
Female terminal block, 2-pin. Pitch 3.81mm. Height 11.1mm. 15EDGK-3.81-2P
No product available!
Female terminal block, 3-pin. Pitch 3.81mm. Height 11.1mm. 15EDGK-3.81-3P
No product available!
Female terminal block, 4-pin. Pitch 3.81mm. Height 11.1mm. 15EDGK-3.81-4P
No product available!
Female terminal block, 5-pin. Pitch 3.81mm. Height 11.1mm. 15EDGK-3.81-5P
No product available!
Female terminal block, 6-pin. Pitch 3.81mm. Height 11.1mm. 15EDGK-3.81-6P
No product available!
Male terminal block, angled, 2-pin. Pitch 5.0mm. Height 7.8mm. 2EDGRC-5.0-2P
No product available!
Male terminal block, angled, 3-pin. Pitch 5.0mm. Height 7.8mm. 2EDGRC-5.0-3P
No product available!
Male terminal block, angled, 4-pin. Pitch 5.0mm. Height 7.8mm. 2EDGRC-5.0-4P
No product available!
Male terminal block, angled, 5-pin. Pitch 5.0mm. Height 7.8mm. 2EDGRC-5.0-5P
No product available!
Male terminal block, angled, 6-pin. Pitch 5.0mm. Height 7.8mm. 2EDGRC-5.0-6P
No product available!