











zł60.25 tax excl.
Tiny, cylindrical gearmotor consists of a coreless brushed DC motor and a 136:1 plastic planetary gearbox. 500 RPM and 45 mA free-run, 8 oz-in (0.6 kg-cm) and 400 mA stall. Pololu 2358
This tiny, cylindrical gearmotor consists of a coreless brushed DC motor and a 136:1 plastic planetary gearbox. The entire assembly has a diameter of just 6 mm (0.24") and an extremely light weight of 1.25 g (0.044 oz), making it a great actuator for miniature robots and very small mechanisms.
Key specs at 6 V: 500 RPM and 45 mA free-run, 8 oz-in (0.6 kg-cm) and 400 mA stall.
These tiny brushed DC gearmotors have a diameter of just 6 mm and weigh just over a gram, which makes them great actuators for miniature robots and very small mechanisms. They consist of a coreless motor fastened to a planetary gearbox by a small clip. The gears are made from liquid crystal polymers (LCPs), and gearbox’s nylon output shaft is compatible with our 14 mm wheels. Three gear ratios are available:
The intended nominal operating voltage for these motors is 3 V to 6 V, though in general, these kinds of motors can be used at voltages outside this range (rotation typically starts between 0.2 V and 0.3 V). Lower voltages might not be practical, and higher voltages could start negatively affecting the life of the motor. When operating at 3 V, the free-run speed, stall torque, and stall current will all be approximately half of what they are at 6 V as these specifications scale roughly linearly with voltage.
Data sheet
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
This tiny, cylindrical gearmotor consists of a coreless brushed DC motor and a 26:1 plastic planetary gearbox. The entire assembly has a diameter of just 6 mm (0.24″) and an extremely light weight of 1.2 g (0.042 oz), making it a great actuator for miniature robots and very small mechanisms.
Key specs at 6 V: 2500 RPM and 35 mA free-run, 1.5 oz-in (0.1 kg-cm) and 400 mA stall.
No product available!
This tiny, cylindrical gearmotor consists of a coreless brushed DC motor and a 700:1 plastic planetary gearbox. The entire assembly has a diameter of just 6 mm (0.24″) and an extremely light weight of 1.3 g (0.046 oz), making it a great actuator for miniature robots and very small mechanisms.
Solarbotics GM8 143:1 Gear Motor Offset Output
A small motor with a plastic 120:1 gear, the output shaft at an angle of 90°, operating voltage 4.5 V, current consumption from 0.08 A to 0.8 A, speed 120 RPM and a maximum torque of 1.4 kg*cm. Pololu 1123
Solarbotics GM9 143:1 Gear Motor 90 deg. Output
Solarbotics GM3 224:1 Gear Motor 90 deg. Output
A small motor with a plastic gear 120:1, operating voltage 4.5 V, current consumption from 0.08 A to 0.8 A, speed 120 RPM and a maximum torque of 1.4 kg*cm. Pololu 1122
No product available!
Solarbotics GM6 120:1 Mini Gear Motor Offset Output
Solarbotics GM10 81:1 Geared Pager Motor
DAGU gearmotors; 4.5V with a no load current of 190mA while possessing a gearbox ratio of 48:1 and a wheel speed of 140 RPM unloaded. axis. ROB-13302
No product available!
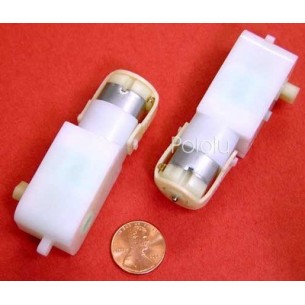
DC motor with a two-sided shaft with built-in 48: 1 gearbox.
No product available!
Tiny, cylindrical gearmotor consists of a coreless brushed DC motor and a 136:1 plastic planetary gearbox. 500 RPM and 45 mA free-run, 8 oz-in (0.6 kg-cm) and 400 mA stall. Pololu 2358
No product available!
This compact, inexpensive plastic gearmotor (brushed DC motor with a 120:1 reduction gearbox) is well suited for use in small robots. While intended for operation at 4.5 V, it should run comfortably in the 3 V to 6 V range.
This compact, inexpensive plastic gearmotor (high-power brushed DC motor with a 120:1 reduction gearbox) is well suited for use in small robots. While intended for operation at 4.5 V, it should run comfortably in the 3 V to 6 V range.
This tiny, cylindrical gearmotor consists of a coreless brushed DC motor and a 26:1 plastic planetary gearbox. The entire assembly has a diameter of just 6 mm (0.24″) and an extremely light weight of 1.2 g (0.042 oz), making it a great actuator for miniature robots and very small mechanisms.
Key specs at 6 V: 2500 RPM and 35 mA free-run, 1.5 oz-in (0.1 kg-cm) and 400 mA stall.
No product available!
This tiny, cylindrical gearmotor consists of a coreless brushed DC motor and a 700:1 plastic planetary gearbox. The entire assembly has a diameter of just 6 mm (0.24″) and an extremely light weight of 1.3 g (0.046 oz), making it a great actuator for miniature robots and very small mechanisms.
DC motor equipped with a gear ratio 120: 1, powered by 6V with a torque of 0.8 kg * cm (0.08 Nm). The current consumed by the unloaded motor is about 170mA, while the maximum current drawn under load is 2.8A. It has an integrated quadrature encoder. DFRobot FIT0450
DC motor with 1:84 planetary gear with a supply voltage from 6 to 24 V and a rotational speed of 140 RPM. Maximum current consumption up to 1.3 A. SparkFun ROB-15277
Tiny, cylindrical gearmotor consists of a coreless brushed DC motor and a 136:1 plastic planetary gearbox. 500 RPM and 45 mA free-run, 8 oz-in (0.6 kg-cm) and 400 mA stall. Pololu 2358