









zł50.33 tax excl.
KAmod Motor Driver is an advanced DC motor controller powered by 6-30 V, enabling power regulation using the PWM method and control of the direction of rotation, compatible with analog and PWM signals from various sources, equipped with overload and thermal protections and soft start and stop functions
KAmod Motor Driver is a controller for an electric motor with a constant voltage of up to 30 V. It allows you to select the direction of motor rotation and adjust its power in the range of 0...100%, which in practice is used to regulate the rotational speed. The control signal can be a voltage signal in one of three ranges: 0...3.3 V, 0...5 V or 0...10 V, or a PWM signal with an amplitude of 3.3 V, 5 V or 10 V. Such signals can be easily obtained from Raspberry, Arduino, Nucleo boards or from a regular potentiometer. The power stage is composed of MOSFET transistors connected in an H-bridge arrangement, which ensures high output power and high driver efficiency.
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
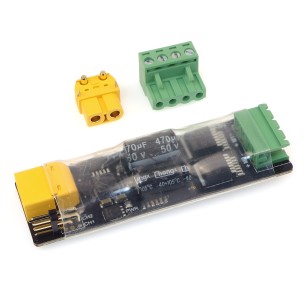
The RoboClaw Solo motor controllers from Basicmicro (formerly Ion Motion Control) can control a single brushed DC motor using USB serial, TTL serial, RC, or analog inputs. Pololu 3291
No product available!
2x1.2A DC Motor Driver is a dual controller of DC motors with a Gravity connector, supplied with 2.5 ... 12V voltage with a maximum current consumption of 1.2A (3.2A peak) per channel. DFRobot DRI0044-A
2x1.2A DC Motor Driver is a dual controller of DC motors powered with 2.5 ... 12V voltage with a maximum current consumption of 1.2A (3.2A peak) per channel. DFRobot DRI0044
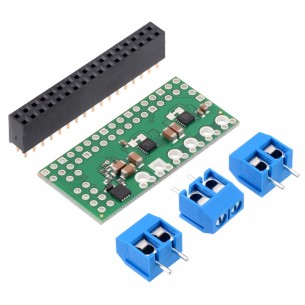
Dual MAX14870 Motor Driver is a dual DC motor controller compatible with the Arduino standard that allows you to control two DC motors with 4.5 ... 36V continuous current of 1.7A. Polol 2519
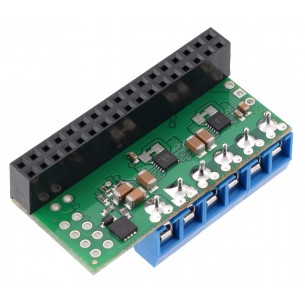
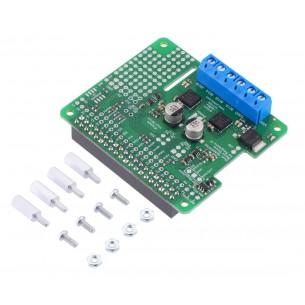
Dual MAX14870 Motor Driver is a dual DC driver compatible with Raspberry Pi that allows you to control two DC motors with 4.5-36V continuous current of 1.7A. Pololu 3759
ual MAX14870 Motor Driver is a dual DC motor driver compatible with the Raspberry Pi standard that allows you to control two DC motors with 4.5 ... 36V continuous current of 1.7A. Pololu 3758
This powerful motor controller makes closed-loop speed or position (but not both!) control of a brushed DC motor easy, with quick configuration over USB using our free software. It supports five control interfaces: USB, TTL serial, I²C, analog voltage (potentiometer), and hobby radio control (RC).
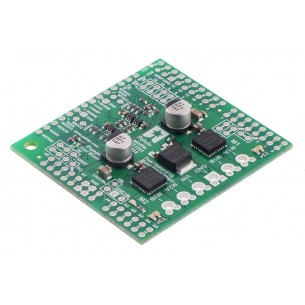
DC motor driver with voltage 6.5 ... 40V and maximum continuous current 13A. It has the ability to easily implement the feedback loop and numerous control interfaces. Polol 3147
DC motor driver with voltage 6.5..30V and maximum continuous current 27A. It has the ability to easily implement the feedback loop and numerous control interfaces. Polol 3148
No product available!
DC motor driver with voltage 6.5..40V and maximum continuous current 21A. It has the ability to easily implement the feedback loop and numerous control interfaces. Polol 3149
No product available!
The controller enables to supply the motors with voltage in the range of 10-47V and power consumption in continuous operation of 1.7A (4.5A peak) for each channel in dual or 3.4A mode (9A peak) in single channel mode. Pololu 2999
TB9051FTG Single Brushed The DC Motor Driver Carrier is a single DC motor driver that allows the motor to be supplied with voltage in the 4.5 ... 28V range and power consumption at a continuous 2.6 A (5A peak) operation. Pololu 2997
DC motor driver module with two channels, dedicated to use in modeling. It can be controlled by an RC transmitter and uses the PPM signal. DFRobot DFR0513
The expansion module is designed to work with micro:bit. It allows you to control 4 DC motors or two stepper motors and 8 servos. It communicates via the I2C interface. DFRobot DFR0548
Dual DC motor controller designed for Arduino, which enables the motor to be supplied with voltage in the 4.5 ... 28V range and power consumption in continuous operation of 2.6 A (5A at the top) of two DC motors. Polol 2520
Dual DC motor controller designed for Raspberry Pi, which enables the engine to be supplied with voltage in the 4.5-28V range and power consumption in continuous operation of 2.6A (5A in peak) of two DC motors. Pololu 2762
KAmod Motor Driver is an advanced DC motor controller powered by 6-30 V, enabling power regulation using the PWM method and control of the direction of rotation, compatible with analog and PWM signals from various sources, equipped with overload and thermal protections and soft start and stop functions